 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Hard and Soft: Mechanical Metamaterials Enable Rigid Torque Transmission in Soft Robots
Dec 03, 2024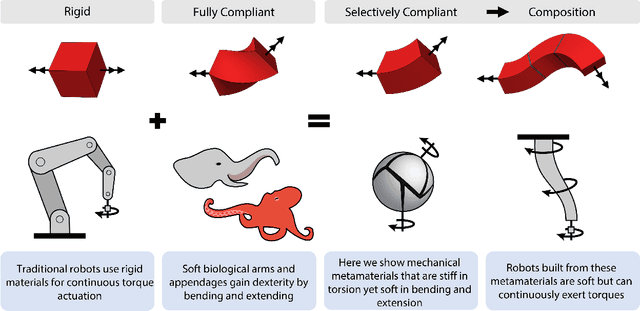
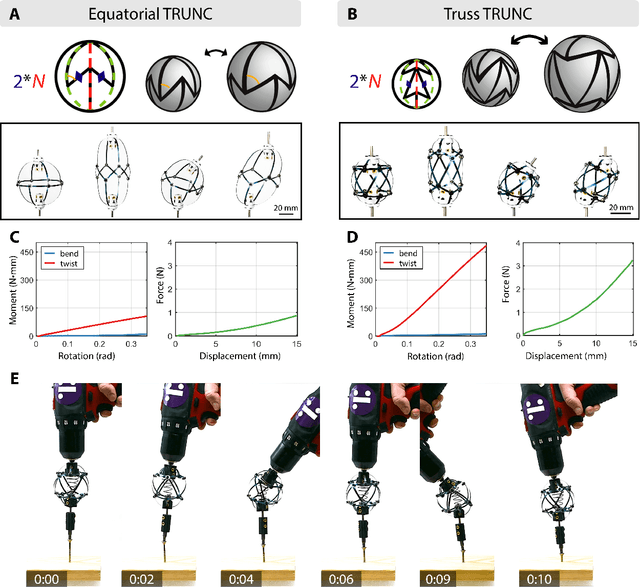

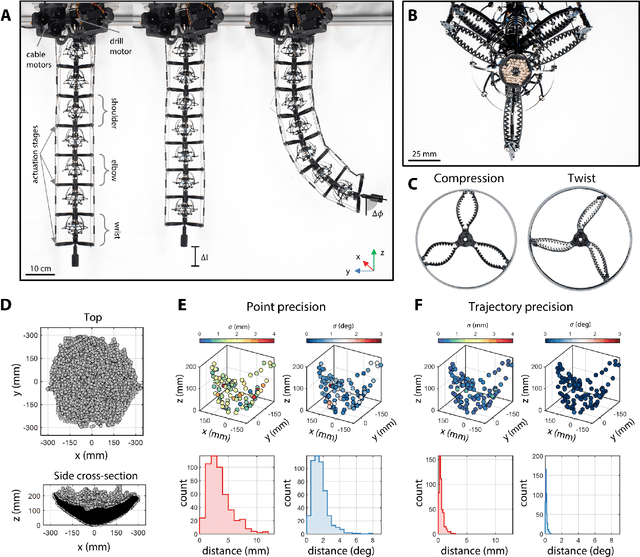
Torque and continuous rotation are fundamental methods of actuation and manipulation in rigid robots. Soft robot arms use soft materials and structures to mimic the passive compliance of biological arms that bend and extend. This use of compliance prevents soft arms from continuously transmitting and exerting torques to interact with their environment. Here, we show how relying on patterning structures instead of inherent material properties allows soft robotic arms to remain compliant while continuously transmitting torque to their environment. We demonstrate a soft robotic arm made from a pair of mechanical metamaterials that act as compliant constant-velocity joints. The joints are up to 52 times stiffer in torsion than bending and can bend up to 45{\deg}. This robot arm can continuously transmit torque while deforming in all other directions. The arm's mechanical design achieves high motion repeatability (0.4 mm and 0.1{\deg}) when tracking trajectories. We then trained a neural network to learn the inverse kinematics, enabling us to program the arm to complete tasks that are challenging for existing soft robots such as installing light bulbs, fastening bolts, and turning valves. The arm's passive compliance makes it safe around humans and provides a source of mechanical intelligence, enabling it to adapt to misalignment when manipulating objects. This work will bridge the gap between hard and soft robotics with applications in human assistance, warehouse automation, and extreme environments.
Kinematic Modeling of Handed Shearing Auxetics via Piecewise Constant Curvature
Dec 09, 2021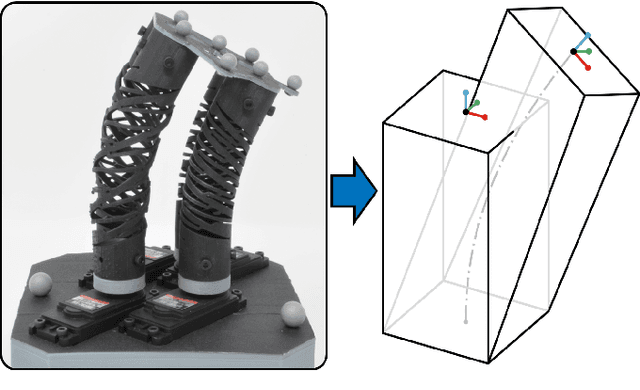
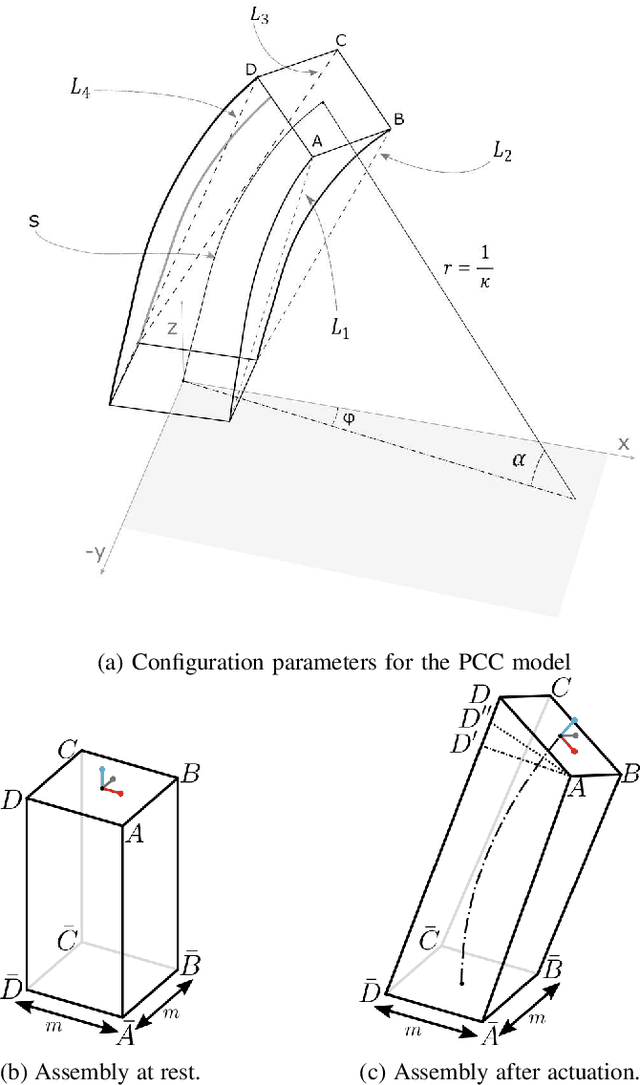
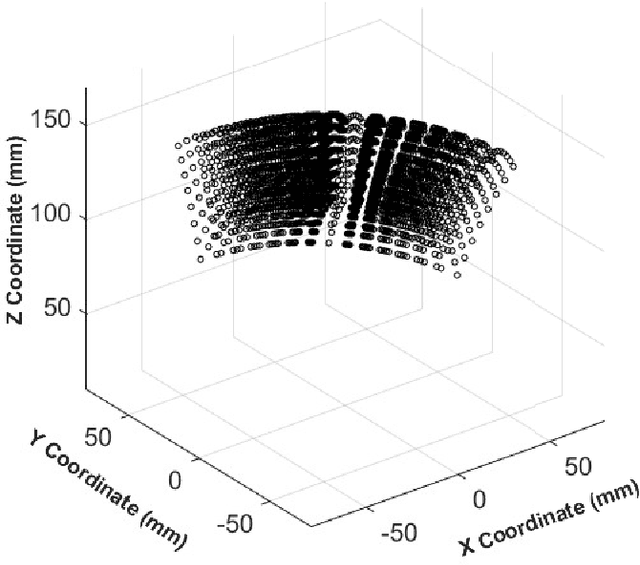
Handed Shearing Auxetics (HSA) are a promising technique for making motor-driven, soft, continuum robots. Many potential applications from inspection tasks to solar tracking require accurate kinematic models to predict the position and orientation of these structures. Currently there are no models for HSA based continuum platforms. To address this gap we propose to adapt Piecewise Constant Curvature (PCC) Models using a length change coupling matrix. This models the interaction of HSA structures in a 2x2 array. The coupling matrix maps the change in motor angles to length changes and defines the configuration space in our modified PCC Model. We evaluate our model on a composite movement encompassing bending, extension and compression behavior. Our model achieves a positional accuracy with mean error of 5.5mm or 4.5% body length and standard deviation of 1.72mm. Further, we achieve an angular accuracy with mean error of -2.8$^\circ$ and standard deviation of 1.9$^\circ$.
Expanding the Design Space for Electrically-Driven Soft Robots through Handed Shearing Auxetics
Oct 01, 2021Handed Shearing Auxetics (HSA) are a promising structure for making electrically driven robots with distributed compliance that convert a motors rotation and torque into extension and force. We overcame past limitations on the range of actuation, blocked force, and stiffness by focusing on two key design parameters: the point of an HSA's auxetic trajectory that is energetically preferred, and the number of cells along the HSAs length. Modeling the HSA as a programmable spring, we characterize the effect of both on blocked force, minimum energy length, spring constant, angle range and holding torque. We also examined the effect viscoelasticity has on actuation forces over time. By varying the auxetic trajectory point, we were able to make actuators that can push, pull, or do both. We expanded the range of forces possible from 5N to 150N, and the range of stiffness from 2 N/mm to 89 N/mm. For a fixed point on the auxetic trajectory, we found decreasing length can improve force output, at the expense of needing higher torques, and having a shorter throw. We also found that the viscoelastic effects can limit the amount of force a 3D printed HSA can apply over time.