 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputational Design of Passive Grippers
Jun 05, 2023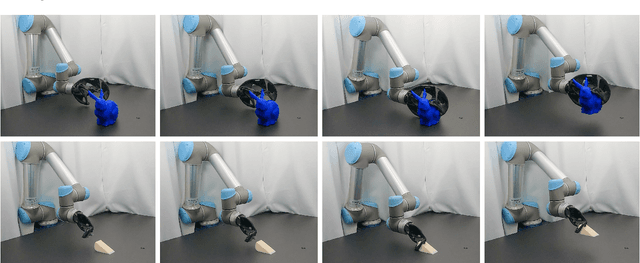
This work proposes a novel generative design tool for passive grippers -- robot end effectors that have no additional actuation and instead leverage the existing degrees of freedom in a robotic arm to perform grasping tasks. Passive grippers are used because they offer interesting trade-offs between cost and capabilities. However, existing designs are limited in the types of shapes that can be grasped. This work proposes to use rapid-manufacturing and design optimization to expand the space of shapes that can be passively grasped. Our novel generative design algorithm takes in an object and its positioning with respect to a robotic arm and generates a 3D printable passive gripper that can stably pick the object up. To achieve this, we address the key challenge of jointly optimizing the shape and the insert trajectory to ensure a passively stable grasp. We evaluate our method on a testing suite of 22 objects (23 experiments), all of which were evaluated with physical experiments to bridge the virtual-to-real gap. Code and data are at https://homes.cs.washington.edu/~milink/passive-gripper/
Reprogrammable Surfaces Through Star Graph Metamaterials
Dec 16, 2021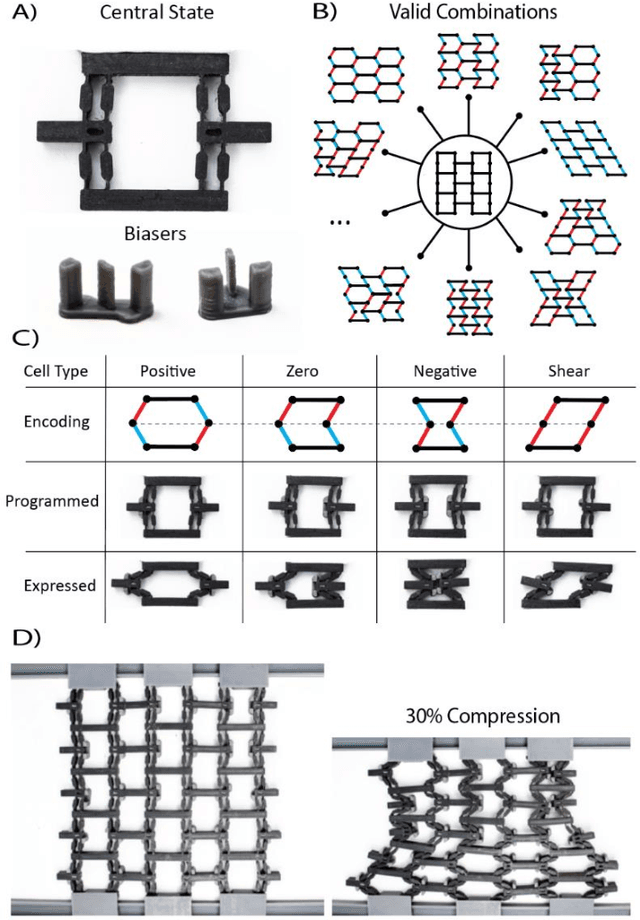
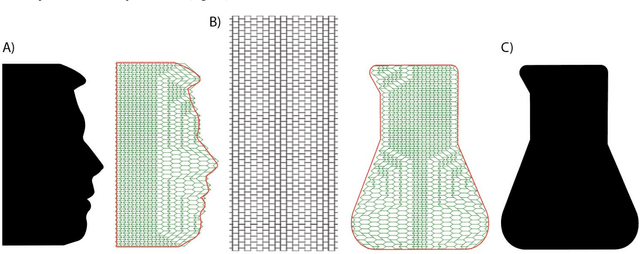
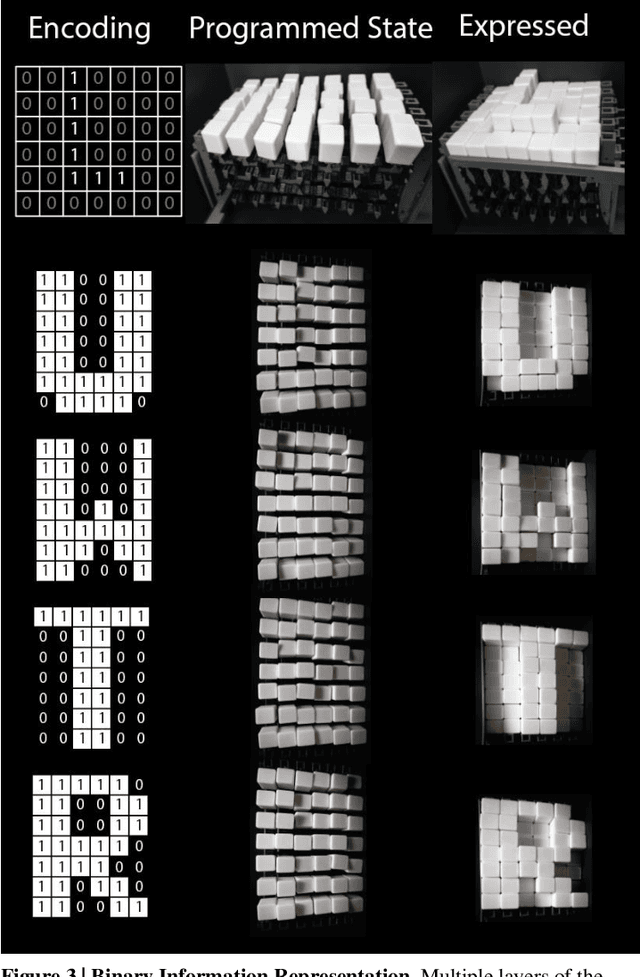
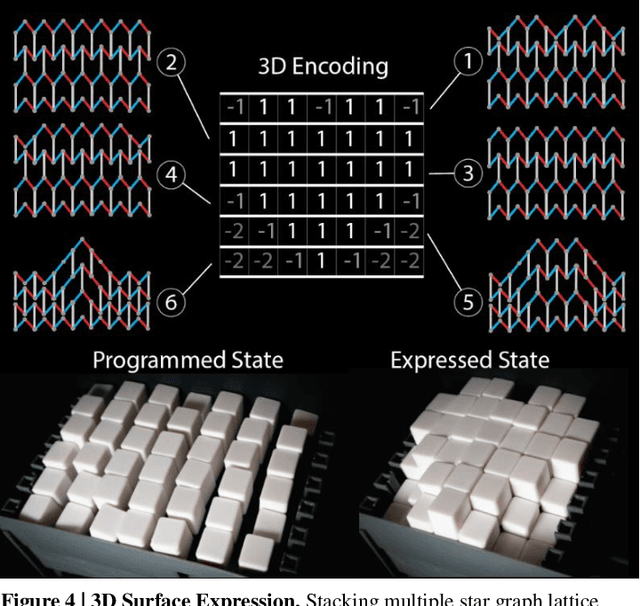
The ability to change a surface's profile allows biological systems to effectively manipulate and blend into their surroundings. Current surface morphing techniques rely either on having a small number of fixed states or on directly driving the entire system. We discovered a subset of scale-independent auxetic metamaterials have a state trajectory with a star-graph structure. At the central node, small nudges can move the material between trajectories, allowing us to locally shift Poisson's ratio, causing the material to take on different shapes under loading. While the number of possible shapes grows exponentially with the size of the material, the probability of finding one at random is vanishingly small. By actively guiding the material through the node points, we produce a reprogrammable surface that does not require inputs to maintain shape and can display arbitrary 2D information and take on complex 3D shapes. Our work opens new opportunities in micro devices, tactile displays, manufacturing, and robotic systems.
Kinematic Modeling of Handed Shearing Auxetics via Piecewise Constant Curvature
Dec 09, 2021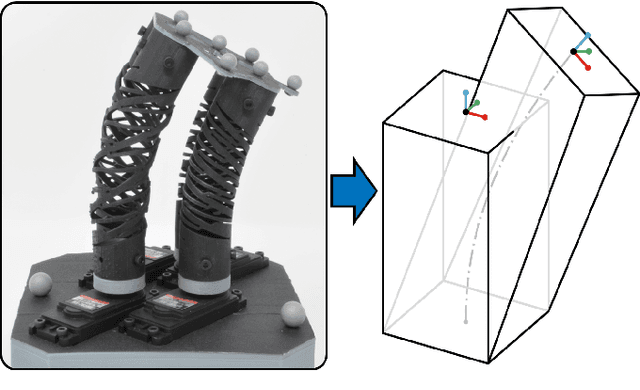
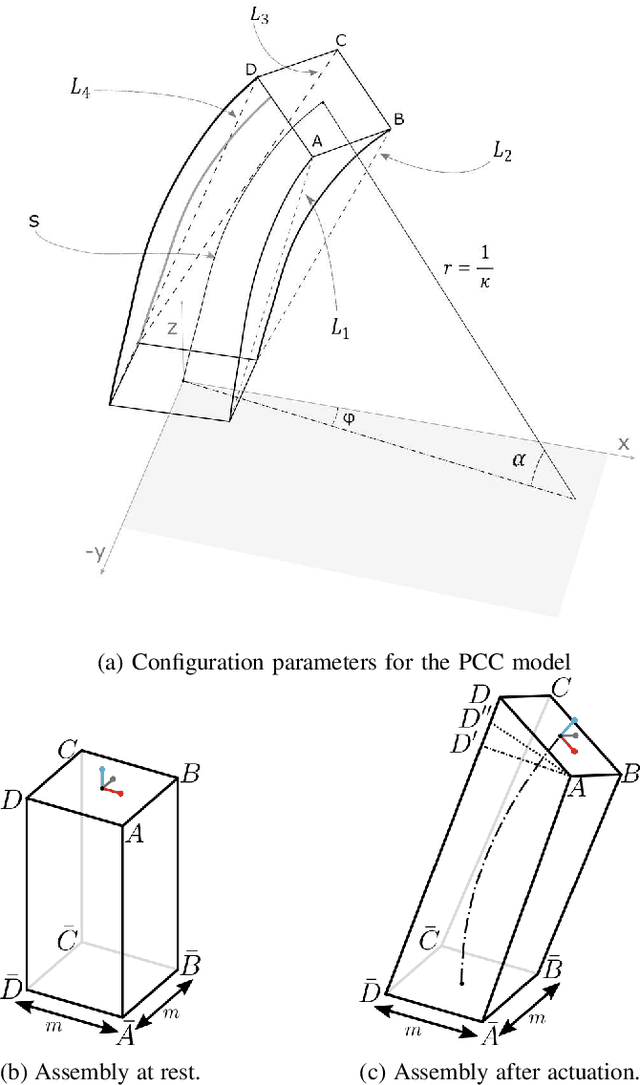
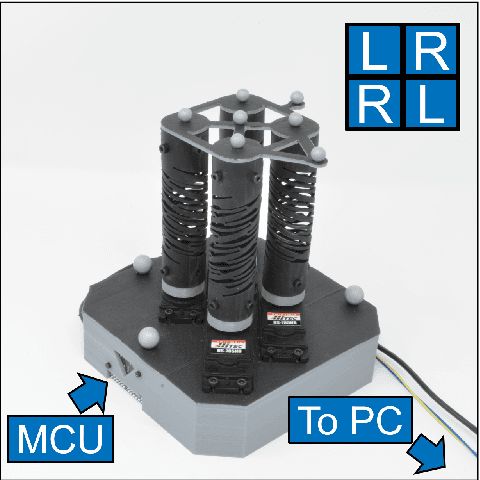
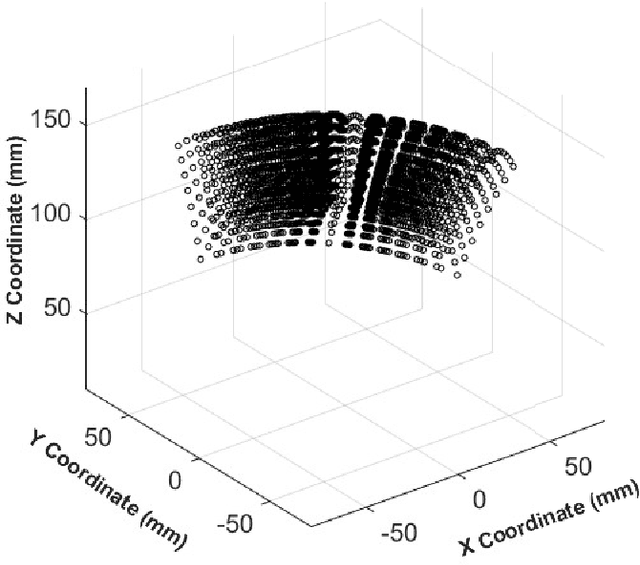
Handed Shearing Auxetics (HSA) are a promising technique for making motor-driven, soft, continuum robots. Many potential applications from inspection tasks to solar tracking require accurate kinematic models to predict the position and orientation of these structures. Currently there are no models for HSA based continuum platforms. To address this gap we propose to adapt Piecewise Constant Curvature (PCC) Models using a length change coupling matrix. This models the interaction of HSA structures in a 2x2 array. The coupling matrix maps the change in motor angles to length changes and defines the configuration space in our modified PCC Model. We evaluate our model on a composite movement encompassing bending, extension and compression behavior. Our model achieves a positional accuracy with mean error of 5.5mm or 4.5% body length and standard deviation of 1.72mm. Further, we achieve an angular accuracy with mean error of -2.8$^\circ$ and standard deviation of 1.9$^\circ$.