 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-shot Sequential Neuro-symbolic Reasoning for Automatically Generating Architecture Schematic Designs
Jan 25, 2024This paper introduces a novel automated system for generating architecture schematic designs aimed at streamlining complex decision-making at the multifamily real estate development project's outset. Leveraging the combined strengths of generative AI (neuro reasoning) and mathematical program solvers (symbolic reasoning), the method addresses both the reliance on expert insights and technical challenges in architectural schematic design. To address the large-scale and interconnected nature of design decisions needed for designing a whole building, we proposed a novel sequential neuro-symbolic reasoning approach, emulating traditional architecture design processes from initial concept to detailed layout. To remove the need to hand-craft a cost function to approximate the desired objectives, we propose a solution that uses neuro reasoning to generate constraints and cost functions that the symbolic solvers can use to solve. We also incorporate feedback loops for each design stage to ensure a tight integration between neuro and symbolic reasoning. Developed using GPT-4 without further training, our method's effectiveness is validated through comparative studies with real-world buildings. Our method can generate various building designs in accordance with the understanding of the neighborhood, showcasing its potential to transform the realm of architectural schematic design.
Computational Design of Passive Grippers
Jun 05, 2023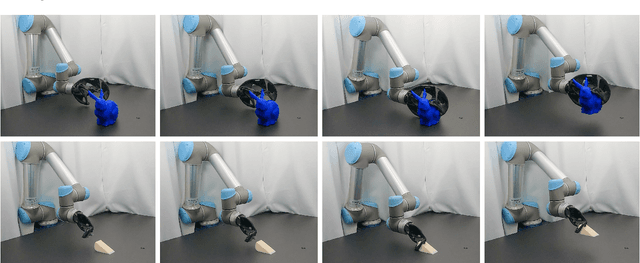
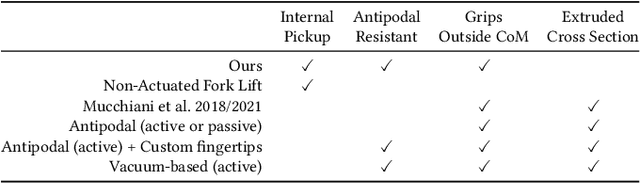
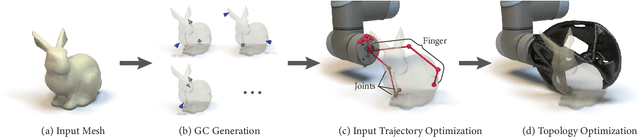
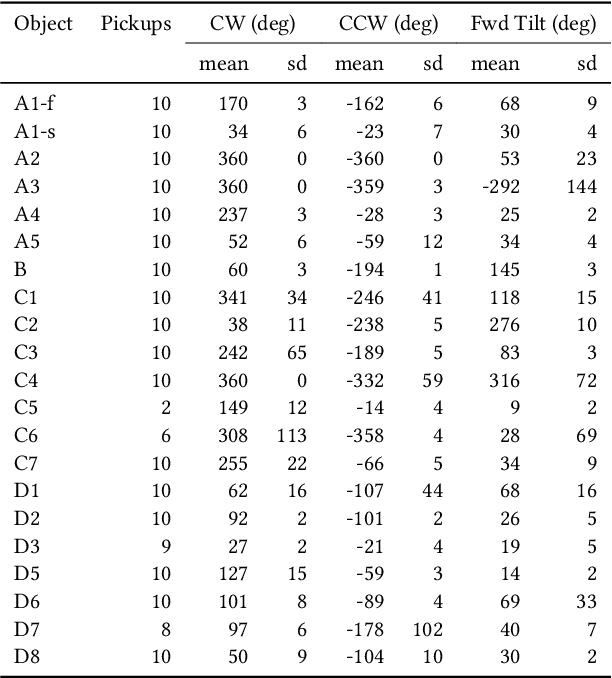
This work proposes a novel generative design tool for passive grippers -- robot end effectors that have no additional actuation and instead leverage the existing degrees of freedom in a robotic arm to perform grasping tasks. Passive grippers are used because they offer interesting trade-offs between cost and capabilities. However, existing designs are limited in the types of shapes that can be grasped. This work proposes to use rapid-manufacturing and design optimization to expand the space of shapes that can be passively grasped. Our novel generative design algorithm takes in an object and its positioning with respect to a robotic arm and generates a 3D printable passive gripper that can stably pick the object up. To achieve this, we address the key challenge of jointly optimizing the shape and the insert trajectory to ensure a passively stable grasp. We evaluate our method on a testing suite of 22 objects (23 experiments), all of which were evaluated with physical experiments to bridge the virtual-to-real gap. Code and data are at https://homes.cs.washington.edu/~milink/passive-gripper/