 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Beam Field for Spatial Beam RSRP Prediction
Aug 09, 2025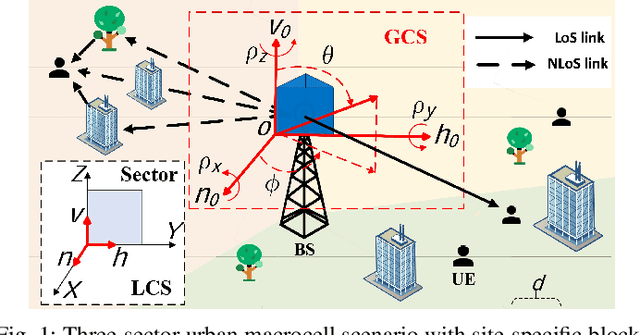
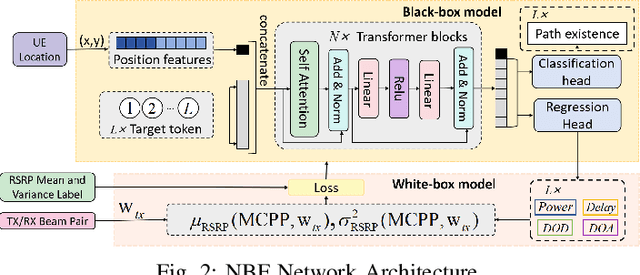
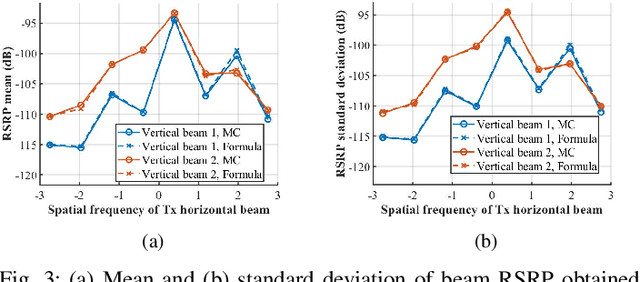
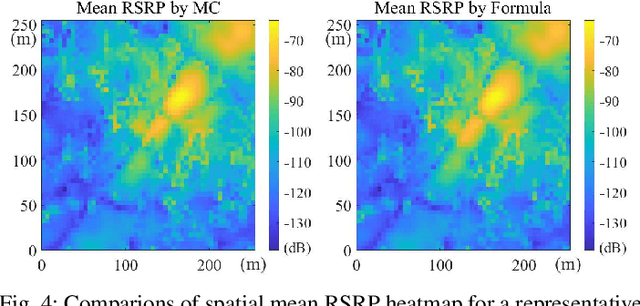
Accurately predicting beam-level reference signal received power (RSRP) is essential for beam management in dense multi-user wireless networks, yet challenging due to high measurement overhead and fast channel variations. This paper proposes Neural Beam Field (NBF), a hybrid neural-physical framework for efficient and interpretable spatial beam RSRP prediction. Central to our approach is the introduction of the Multi-path Conditional Power Profile (MCPP), which bridges site-specific multipath propagation with antenna/beam configurations via closed-form analytical modeling. We adopt a decoupled ``blackbox-whitebox" design: a Transformer-based deep neural network (DNN) learns the MCPP from sparse user measurements and positions, while a physics-inspired module analytically infers beam RSRP statistics. To improve convergence and adaptivity, we further introduce a Pretrain-and-Calibrate (PaC) strategy that leverages ray-tracing priors and on-site calibration using RSRP data. Extensive simulations results demonstrate that NBF significantly outperforms conventional table-based channel knowledge maps (CKMs) and pure blackbox DNNs in prediction accuracy, training efficiency, and generalization, while maintaining a compact model size. The proposed framework offers a scalable and physically grounded solution for intelligent beam management in next-generation dense wireless networks.
Neural Channel Knowledge Map Assisted Scheduling Optimization of Active IRSs in Multi-User Systems
Aug 09, 2025



Intelligent Reflecting Surfaces (IRSs) have potential for significant performance gains in next-generation wireless networks but face key challenges, notably severe double-pathloss and complex multi-user scheduling due to hardware constraints. Active IRSs partially address pathloss but still require efficient scheduling in cell-level multi-IRS multi-user systems, whereby the overhead/delay of channel state acquisition and the scheduling complexity both rise dramatically as the user density and channel dimensions increase. Motivated by these challenges, this paper proposes a novel scheduling framework based on neural Channel Knowledge Map (CKM), designing Transformer-based deep neural networks (DNNs) to predict ergodic spectral efficiency (SE) from historical channel/throughput measurements tagged with user positions. Specifically, two cascaded networks, LPS-Net and SE-Net, are designed to predict link power statistics (LPS) and ergodic SE accurately. We further propose a low-complexity Stable Matching-Iterative Balancing (SM-IB) scheduling algorithm. Numerical evaluations verify that the proposed neural CKM significantly enhances prediction accuracy and computational efficiency, while the SM-IB algorithm effectively achieves near-optimal max-min throughput with greatly reduced complexity.
Quasi-Static IRS: 3D Shaped Beamforming for Area Coverage Enhancement
May 02, 2025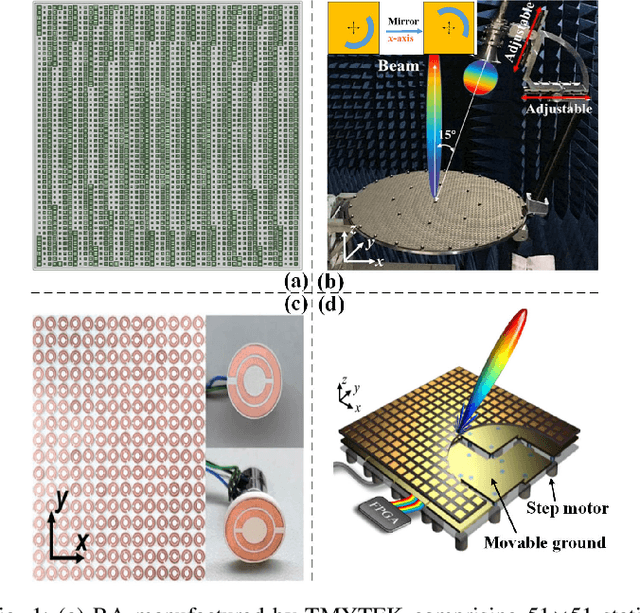



Intelligent reflecting surface (IRS) is a promising paradigm to reconfigure the wireless environment for enhanced communication coverage and quality. However, to compensate for the double pathloss effect, massive IRS elements are required, raising concerns on the scalability of cost and complexity. This paper introduces a new architecture of quasi-static IRS (QS-IRS), which tunes element phases via mechanical adjustment or manually re-arranging the array topology. QS-IRS relies on massive production/assembly of purely passive elements only, and thus is suitable for ultra low-cost and large-scale deployment to enhance long-term coverage. To achieve this end, an IRS-aided area coverage problem is formulated, which explicitly considers the element radiation pattern (ERP), with the newly introduced shape masks for the mainlobe, and the sidelobe constraints to reduce energy leakage. An alternating optimization (AO) algorithm based on the difference-of-convex (DC) and successive convex approximation (SCA) procedure is proposed, which achieves shaped beamforming with power gains close to that of the joint optimization algorithm, but with significantly reduced computational complexity.
AFDM Channel Estimation in Multi-Scale Multi-Lag Channels
May 04, 2024



Affine Frequency Division Multiplexing (AFDM) is a brand new chirp-based multi-carrier (MC) waveform for high mobility communications, with promising advantages over Orthogonal Frequency Division Multiplexing (OFDM) and other MC waveforms. Existing AFDM research focuses on wireless communication at high carrier frequency (CF), which typically considers only Doppler frequency shift (DFS) as a result of mobility, while ignoring the accompanied Doppler time scaling (DTS) on waveform. However, for underwater acoustic (UWA) communication at much lower CF and propagating at speed of sound, the DTS effect could not be ignored and poses significant challenges for channel estimation. This paper analyzes the channel frequency response (CFR) of AFDM under multi-scale multi-lag (MSML) channels, where each propagating path could have different delay and DFS/DTS. Based on the newly derived input-output formula and its characteristics, two new channel estimation methods are proposed, i.e., AFDM with iterative multi-index (AFDM-IMI) estimation under low to moderate DTS, and AFDM with orthogonal matching pursuit (AFDM-OMP) estimation under high DTS. Numerical results confirm the effectiveness of the proposed methods against the original AFDM channel estimation method. Moreover, the resulted AFDM system outperforms OFDM as well as Orthogonal Chirp Division Multiplexing (OCDM) in terms of channel estimation accuracy and bit error rate (BER), which is consistent with our theoretical analysis based on CFR overlap probability (COP), mutual incoherent property (MIP) and channel diversity gain under MSML channels.
IRS-Aided Sectorized Base Station Design and 3D Coverage Performance Analysis
Dec 16, 2023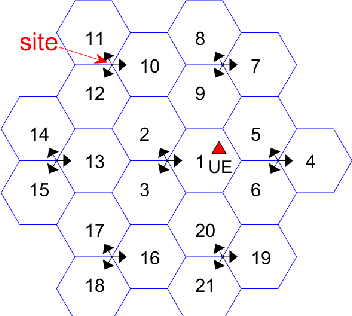
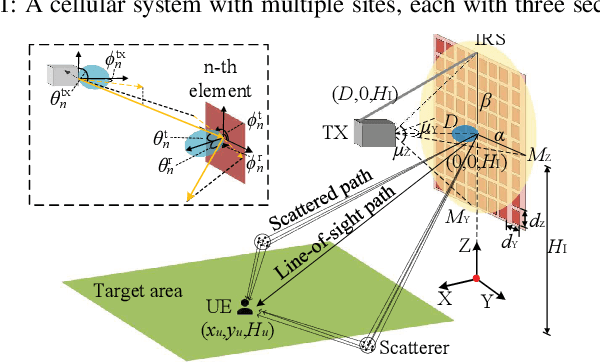
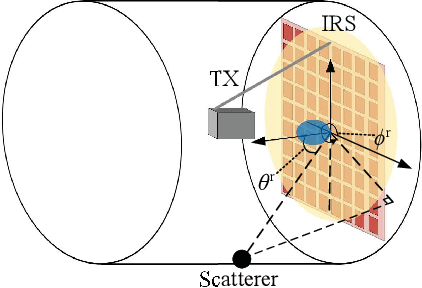
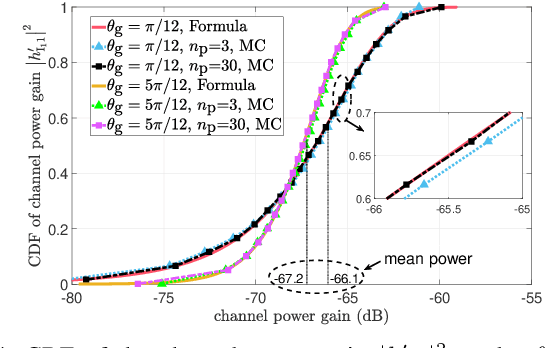
Intelligent reflecting surface (IRS) is regarded as a revolutionary paradigm that can reconfigure the wireless propagation environment for enhancing the desired signal and/or weakening the interference, and thus improving the quality of service (QoS) for communication systems. In this paper, we propose an IRS-aided sectorized BS design where the IRS is mounted in front of a transmitter (TX) and reflects/reconfigures signal towards the desired user equipment (UE). Unlike prior works that address link-level analysis/optimization of IRS-aided systems, we focus on the system-level three-dimensional (3D) coverage performance in both single-/multiple-cell scenarios. To this end, a distance/angle-dependent 3D channel model is considered for UEs in the 3D space, as well as the non-isotropic TX beam pattern and IRS element radiation pattern (ERP), both of which affect the average channel power as well as the multi-path fading statistics. Based on the above, a general formula of received signal power in our design is obtained, along with derived power scaling laws and upper/lower bounds on the mean signal/interference power under IRS passive beamforming or random scattering. Numerical results validate our analysis and demonstrate that our proposed design outperforms the benchmark schemes with fixed BS antenna patterns or active 3D beamforming. In particular, for aerial UEs that suffer from strong inter-cell interference, the IRS-aided BS design provides much better QoS in terms of the ergodic throughput performance compared with benchmarks, thanks to the IRS-inherent double pathloss effect that helps weaken the interference.
Spatial Deep Learning for Site-Specific Movement Optimization of Aerial Base Stations
Dec 16, 2023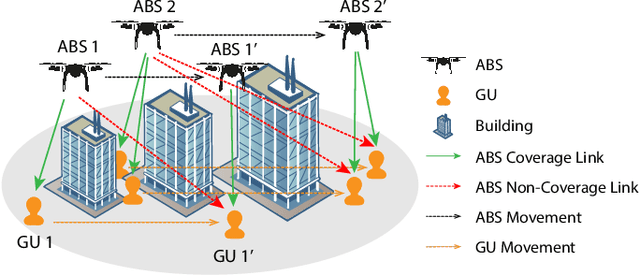

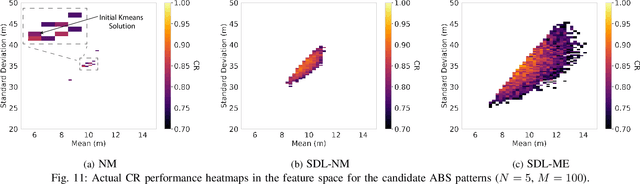

Unmanned aerial vehicles (UAVs) can be utilized as aerial base stations (ABSs) to provide wireless connectivity for ground users (GUs) in various emergency scenarios. However, it is a NP-hard problem with exponential complexity in $M$ and $N$, in order to maximize the coverage rate of $M$ GUs by jointly placing $N$ ABSs with limited coverage range. The problem is further complicated when the coverage range becomes irregular due to site-specific blockages (e.g., buildings) on the air-ground channel, and/or when the GUs are moving. To address the above challenges, we study a multi-ABS movement optimization problem to maximize the average coverage rate of mobile GUs in a site-specific environment. The Spatial Deep Learning with Multi-dimensional Archive of Phenotypic Elites (SDL-ME) algorithm is proposed to tackle this challenging problem by 1) partitioning the complicated ABS movement problem into ABS placement sub-problems each spanning finite time horizon; 2) using an encoder-decoder deep neural network (DNN) as the emulator to capture the spatial correlation of ABSs/GUs and thereby reducing the cost of interaction with the actual environment; 3) employing the emulator to speed up a quality-diversity search for the optimal placement solution; and 4) proposing a planning-exploration-serving scheme for multi-ABS movement coordination. Numerical results demonstrate that the proposed approach significantly outperforms the benchmark Deep Reinforcement Learning (DRL)-based method and other two baselines in terms of average coverage rate, training time and/or sample efficiency. Moreover, with one-time training, our proposed method can be applied in scenarios where the number of ABSs/GUs dynamically changes on site and/or with different/varying GU speeds, which is thus more robust and flexible compared with conventional DRL-based methods.
Placement Optimization of Aerial Base Stations with Deep Reinforcement Learning
Nov 19, 2019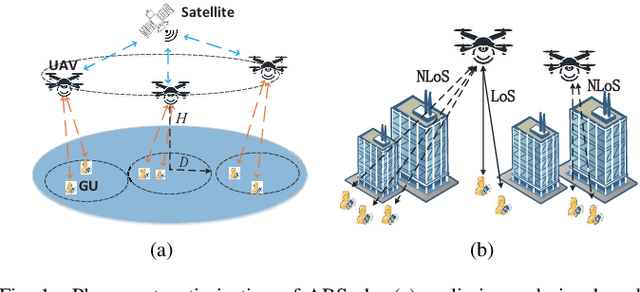
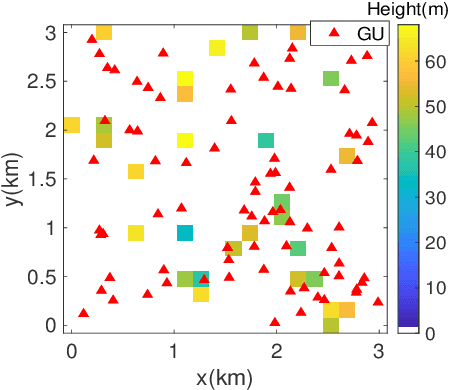
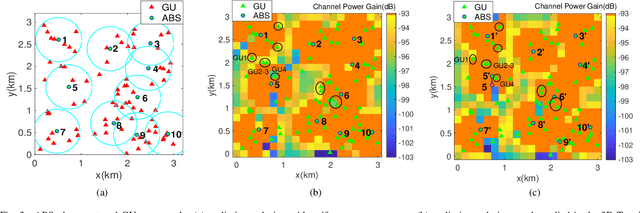
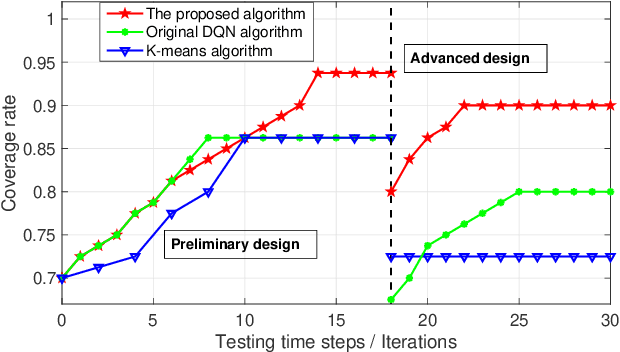
Unmanned aerial vehicles (UAVs) can be utilized as aerial base stations (ABSs) to assist terrestrial infrastructure for keeping wireless connectivity in various emergency scenarios. To maximize the coverage rate of N ground users (GUs) by jointly placing multiple ABSs with limited coverage range is known to be a NP-hard problem with exponential complexity in N. The problem is further complicated when the coverage range becomes irregular due to site-specific blockage (e.g., buildings) on the air-ground channel in the 3-dimensional (3D) space. To tackle this challenging problem, this paper applies the Deep Reinforcement Learning (DRL) method by 1) representing the state by a coverage bitmap to capture the spatial correlation of GUs/ABSs, whose dimension and associated neural network complexity is invariant with arbitrarily large N; and 2) designing the action and reward for the DRL agent to effectively learn from the dynamic interactions with the complicated propagation environment represented by a 3D Terrain Map. Specifically, a novel two-level design approach is proposed, consisting of a preliminary design based on the dominant line-of-sight (LoS) channel model, and an advanced design to further refine the ABS positions based on site-specific LoS/non-LoS channel states. The double deep Q-network (DQN) with Prioritized Experience Replay (Prioritized Replay DDQN) algorithm is applied to train the policy of multi-ABS placement decision. Numerical results show that the proposed approach significantly improves the coverage rate in complex environment, compared to the benchmark DQN and K-means algorithms.