 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Sample Efficient Multi-Task Representation Learning in Stochastic Contextual Bandits
Oct 02, 2024

We study how representation learning can improve the learning efficiency of contextual bandit problems. We study the setting where we play T contextual linear bandits with dimension d simultaneously, and these T bandit tasks collectively share a common linear representation with a dimensionality of r much smaller than d. We present a new algorithm based on alternating projected gradient descent (GD) and minimization estimator to recover a low-rank feature matrix. Using the proposed estimator, we present a multi-task learning algorithm for linear contextual bandits and prove the regret bound of our algorithm. We presented experiments and compared the performance of our algorithm against benchmark algorithms.
Distributed Multi-Task Learning for Stochastic Bandits with Context Distribution and Stage-wise Constraints
Jan 21, 2024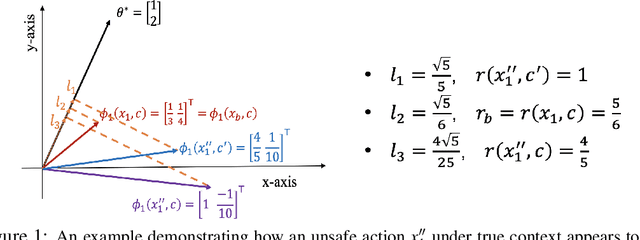
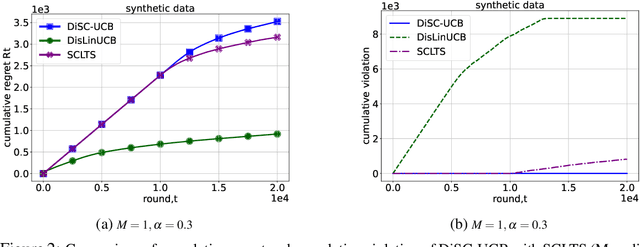
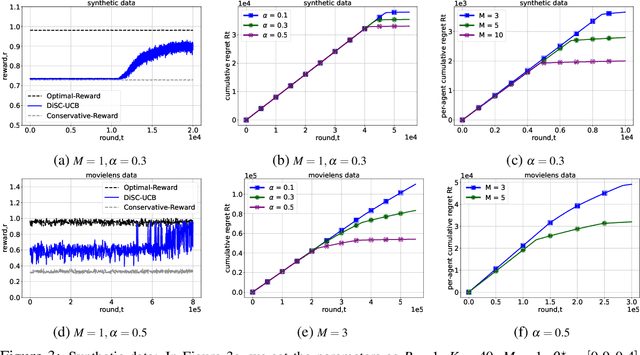
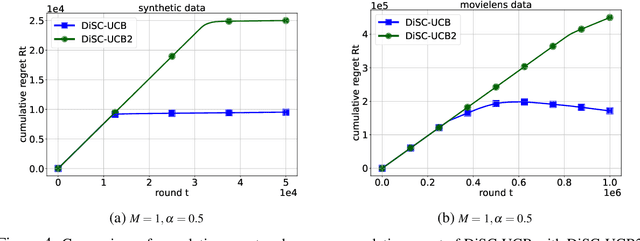
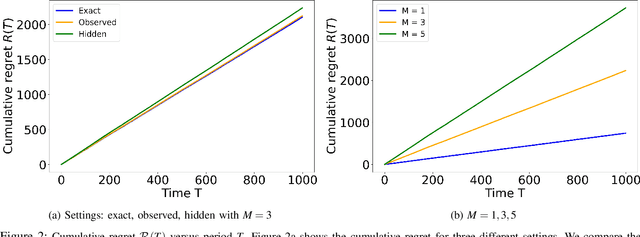
We present the problem of conservative distributed multi-task learning in stochastic linear contextual bandits with heterogeneous agents. This extends conservative linear bandits to a distributed setting where M agents tackle different but related tasks while adhering to stage-wise performance constraints. The exact context is unknown, and only a context distribution is available to the agents as in many practical applications that involve a prediction mechanism to infer context, such as stock market prediction and weather forecast. We propose a distributed upper confidence bound (UCB) algorithm, DiSC-UCB. Our algorithm constructs a pruned action set during each round to ensure the constraints are met. Additionally, it includes synchronized sharing of estimates among agents via a central server using well-structured synchronization steps. We prove the regret and communication bounds on the algorithm. We extend the problem to a setting where the agents are unaware of the baseline reward. For this setting, we provide a modified algorithm, DiSC-UCB2, and we show that the modified algorithm achieves the same regret and communication bounds. We empirically validated the performance of our algorithm on synthetic data and real-world Movielens-100K data.
Federated Stochastic Bandit Learning with Unobserved Context
Mar 29, 2023
We study the problem of federated stochastic multi-arm contextual bandits with unknown contexts, in which M agents are faced with different bandits and collaborate to learn. The communication model consists of a central server and the agents share their estimates with the central server periodically to learn to choose optimal actions in order to minimize the total regret. We assume that the exact contexts are not observable and the agents observe only a distribution of the contexts. Such a situation arises, for instance, when the context itself is a noisy measurement or based on a prediction mechanism. Our goal is to develop a distributed and federated algorithm that facilitates collaborative learning among the agents to select a sequence of optimal actions so as to maximize the cumulative reward. By performing a feature vector transformation, we propose an elimination-based algorithm and prove the regret bound for linearly parametrized reward functions. Finally, we validated the performance of our algorithm and compared it with another baseline approach using numerical simulations on synthetic data and on the real-world movielens dataset.
Distributed Stochastic Bandit Learning with Context Distributions
Jul 28, 2022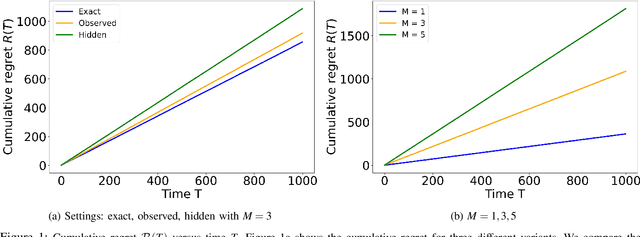
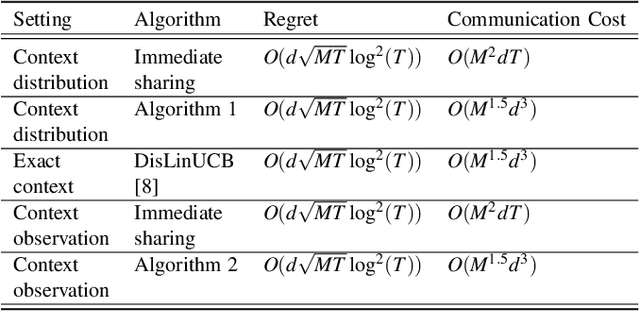
We study the problem of distributed stochastic multi-arm contextual bandit with unknown contexts, in which M agents work collaboratively to choose optimal actions under the coordination of a central server in order to minimize the total regret. In our model, an adversary chooses a distribution on the set of possible contexts and the agents observe only the context distribution and the exact context is unknown to the agents. Such a situation arises, for instance, when the context itself is a noisy measurement or based on a prediction mechanism as in weather forecasting or stock market prediction. Our goal is to develop a distributed algorithm that selects a sequence of optimal actions to maximize the cumulative reward. By performing a feature vector transformation and by leveraging the UCB algorithm, we propose a UCB algorithm for stochastic bandits with context distribution and prove that our algorithm achieves a regret and communications bounds of $O(d\sqrt{MT}log^2T)$ and $O(M^{1.5}d^3)$, respectively, for linearly parametrized reward functions. We also consider a case where the agents observe the actual context after choosing the action. For this setting we presented a modified algorithm that utilizes the additional information to achieve a tighter regret bound. Finally, we validated the performance of our algorithms and compared it with other baseline approaches using extensive simulations on synthetic data and on the real world movielens dataset.
Stochastic Conservative Contextual Linear Bandits
Mar 29, 2022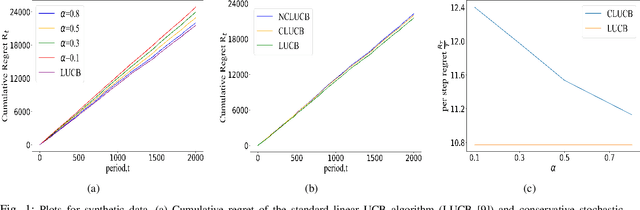
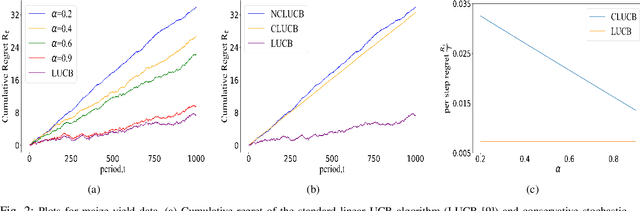
Many physical systems have underlying safety considerations that require that the strategy deployed ensures the satisfaction of a set of constraints. Further, often we have only partial information on the state of the system. We study the problem of safe real-time decision making under uncertainty. In this paper, we formulate a conservative stochastic contextual bandit formulation for real-time decision making when an adversary chooses a distribution on the set of possible contexts and the learner is subject to certain safety/performance constraints. The learner observes only the context distribution and the exact context is unknown, and the goal is to develop an algorithm that selects a sequence of optimal actions to maximize the cumulative reward without violating the safety constraints at any time step. By leveraging the UCB algorithm for this setting, we propose a conservative linear UCB algorithm for stochastic bandits with context distribution. We prove an upper bound on the regret of the algorithm and show that it can be decomposed into three terms: (i) an upper bound for the regret of the standard linear UCB algorithm, (ii) a constant term (independent of time horizon) that accounts for the loss of being conservative in order to satisfy the safety constraint, and (ii) a constant term (independent of time horizon) that accounts for the loss for the contexts being unknown and only the distribution being known. To validate the performance of our approach we perform extensive simulations on synthetic data and on real-world maize data collected through the Genomes to Fields (G2F) initiative.