 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAffordance Perception by a Knowledge-Guided Vision-Language Model with Efficient Error Correction
Jul 18, 2024Mobile robot platforms will increasingly be tasked with activities that involve grasping and manipulating objects in open world environments. Affordance understanding provides a robot with means to realise its goals and execute its tasks, e.g. to achieve autonomous navigation in unknown buildings where it has to find doors and ways to open these. In order to get actionable suggestions, robots need to be able to distinguish subtle differences between objects, as they may result in different action sequences: doorknobs require grasp and twist, while handlebars require grasp and push. In this paper, we improve affordance perception for a robot in an open-world setting. Our contribution is threefold: (1) We provide an affordance representation with precise, actionable affordances; (2) We connect this knowledge base to a foundational vision-language models (VLM) and prompt the VLM for a wider variety of new and unseen objects; (3) We apply a human-in-the-loop for corrections on the output of the VLM. The mix of affordance representation, image detection and a human-in-the-loop is effective for a robot to search for objects to achieve its goals. We have demonstrated this in a scenario of finding various doors and the many different ways to open them.
* 15 pages
Which objects help me to act effectively? Reasoning about physically-grounded affordances
Jul 18, 2024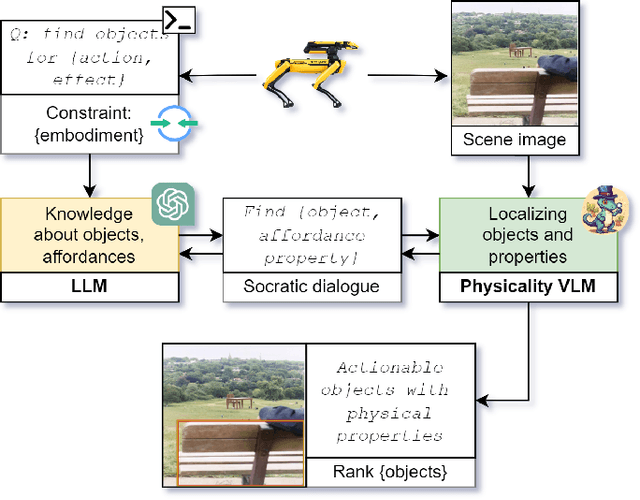
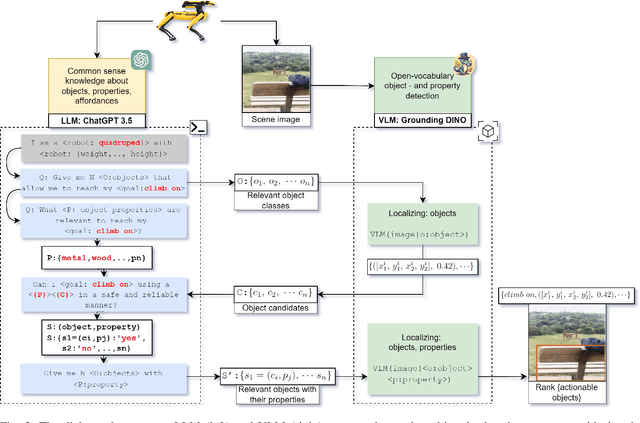
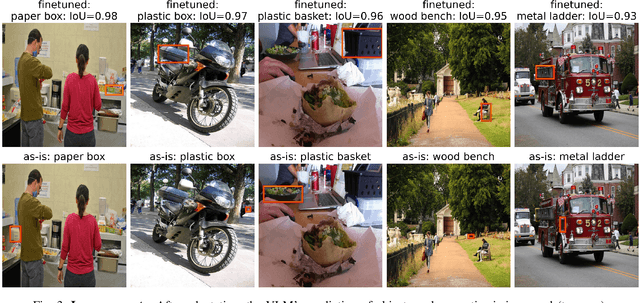
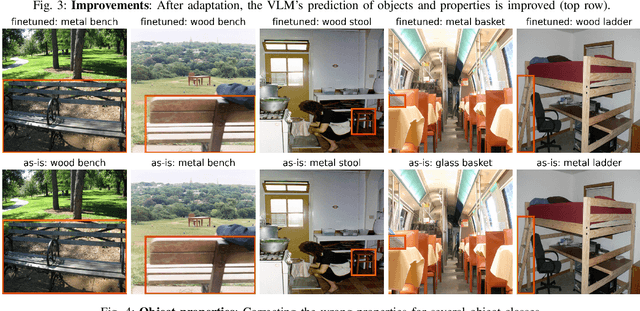
For effective interactions with the open world, robots should understand how interactions with known and novel objects help them towards their goal. A key aspect of this understanding lies in detecting an object's affordances, which represent the potential effects that can be achieved by manipulating the object in various ways. Our approach leverages a dialogue of large language models (LLMs) and vision-language models (VLMs) to achieve open-world affordance detection. Given open-vocabulary descriptions of intended actions and effects, the useful objects in the environment are found. By grounding our system in the physical world, we account for the robot's embodiment and the intrinsic properties of the objects it encounters. In our experiments, we have shown that our method produces tailored outputs based on different embodiments or intended effects. The method was able to select a useful object from a set of distractors. Finetuning the VLM for physical properties improved overall performance. These results underline the importance of grounding the affordance search in the physical world, by taking into account robot embodiment and the physical properties of objects.
* 10 pages
Open-World Visual Reasoning by a Neuro-Symbolic Program of Zero-Shot Symbols
Jul 18, 2024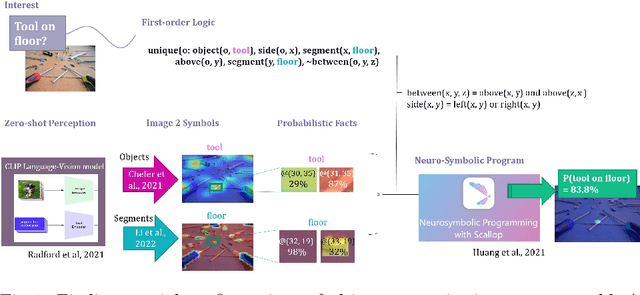

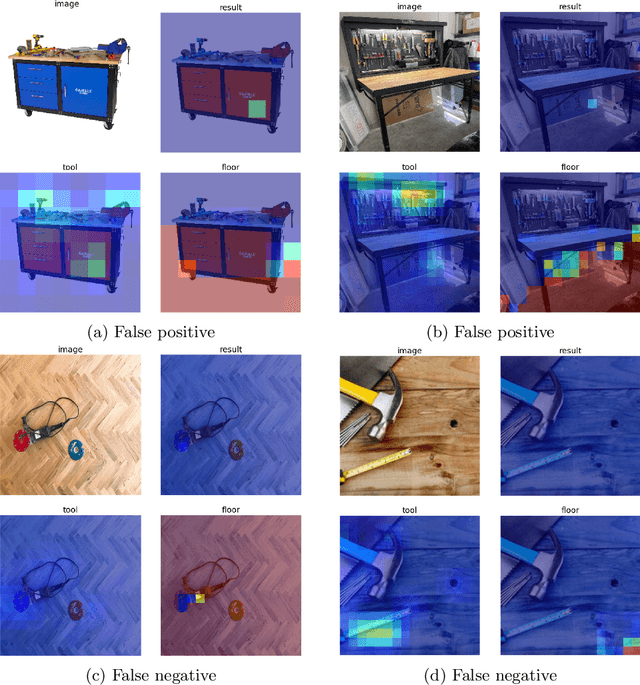
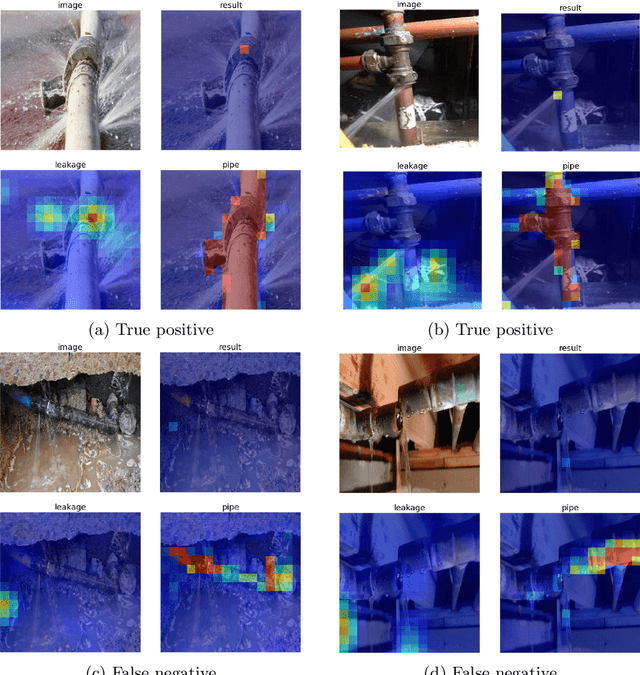
We consider the problem of finding spatial configurations of multiple objects in images, e.g., a mobile inspection robot is tasked to localize abandoned tools on the floor. We define the spatial configuration of objects by first-order logic in terms of relations and attributes. A neuro-symbolic program matches the logic formulas to probabilistic object proposals for the given image, provided by language-vision models by querying them for the symbols. This work is the first to combine neuro-symbolic programming (reasoning) and language-vision models (learning) to find spatial configurations of objects in images in an open world setting. We show the effectiveness by finding abandoned tools on floors and leaking pipes. We find that most prediction errors are due to biases in the language-vision model.
* 12 pages