 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhich objects help me to act effectively? Reasoning about physically-grounded affordances
Jul 18, 2024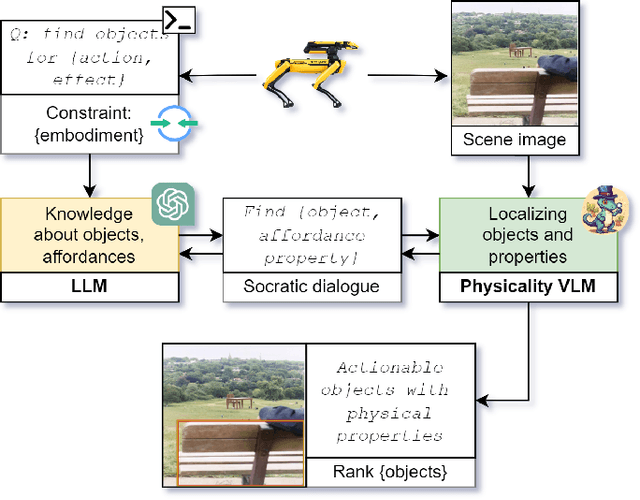
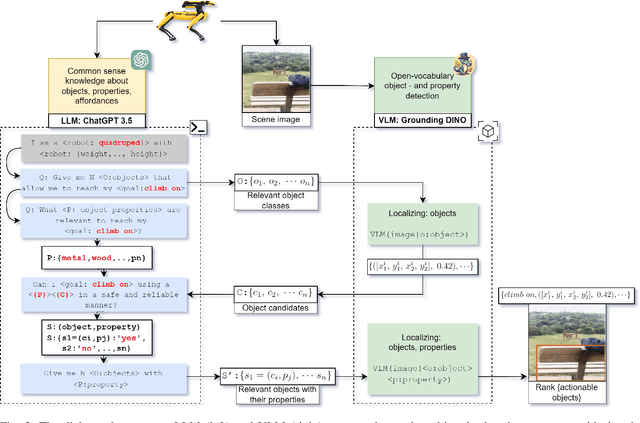
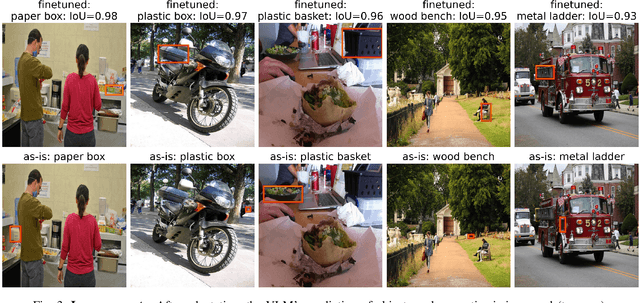
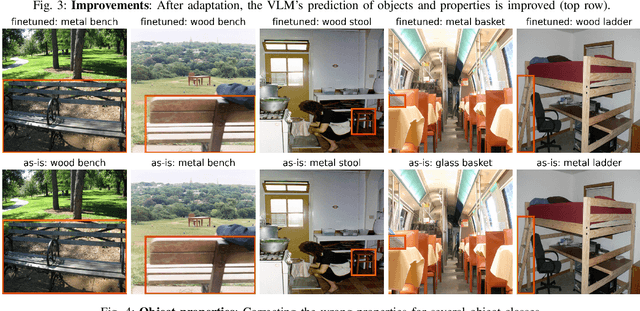
For effective interactions with the open world, robots should understand how interactions with known and novel objects help them towards their goal. A key aspect of this understanding lies in detecting an object's affordances, which represent the potential effects that can be achieved by manipulating the object in various ways. Our approach leverages a dialogue of large language models (LLMs) and vision-language models (VLMs) to achieve open-world affordance detection. Given open-vocabulary descriptions of intended actions and effects, the useful objects in the environment are found. By grounding our system in the physical world, we account for the robot's embodiment and the intrinsic properties of the objects it encounters. In our experiments, we have shown that our method produces tailored outputs based on different embodiments or intended effects. The method was able to select a useful object from a set of distractors. Finetuning the VLM for physical properties improved overall performance. These results underline the importance of grounding the affordance search in the physical world, by taking into account robot embodiment and the physical properties of objects.
* 10 pages
Wi-Closure: Reliable and Efficient Search of Inter-robot Loop Closures Using Wireless Sensing
Oct 04, 2022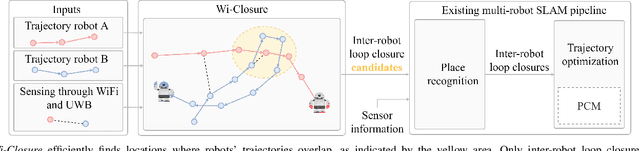
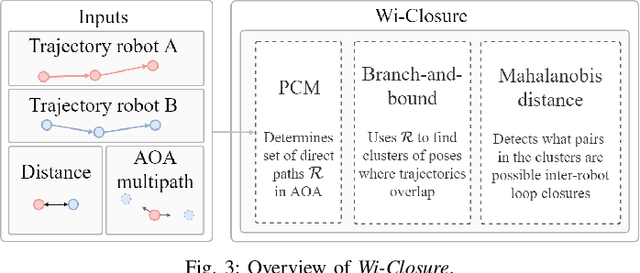
In this paper we propose a novel algorithm, Wi-Closure, to improve computational efficiency and robustness of loop closure detection in multi-robot SLAM. Our approach decreases the computational overhead of classical approaches by pruning the search space of potential loop closures, prior to evaluation by a typical multi-robot SLAM pipeline. Wi-Closure achieves this by identifying candidates that are spatially close to each other by using sensing over the wireless communication signal between robots, even when they are operating in non-line-of-sight or in remote areas of the environment from one another. We demonstrate the validity of our approach in simulation and hardware experiments. Our results show that using Wi-closure greatly reduces computation time, by 54% in simulation and by 77% in hardware compared, with a multi-robot SLAM baseline. Importantly, this is achieved without sacrificing accuracy. Using Wi-Closure reduces absolute trajectory estimation error by 99% in simulation and 89.2% in hardware experiments. This improvement is due in part to Wi-Closure's ability to avoid catastrophic optimization failure that typically occurs with classical approaches in challenging repetitive environments.