 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvably Safe and Deadlock-Free Execution of Multi-Robot Plans under Delaying Disturbances
Mar 28, 2016
One of the standing challenges in multi-robot systems is the ability to reliably coordinate motions of multiple robots in environments where the robots are subject to disturbances. We consider disturbances that force the robot to temporarily stop and delay its advancement along its planned trajectory which can be used to model, e.g., passing-by humans for whom the robots have to yield. Although reactive collision-avoidance methods are often used in this context, they may lead to deadlocks between robots. We design a multi-robot control strategy for executing coordinated trajectories computed by a multi-robot trajectory planner and give a proof that the strategy is safe and deadlock-free even when robots are subject to delaying disturbances. Our simulations show that the proposed strategy scales significantly better with the intensity of disturbances than the naive liveness-preserving approach. The empirical results further confirm that the proposed approach is more reliable and also more efficient than state-of-the-art reactive techniques.
Robust multirobot coordination using priority encoded homotopic constraints
Aug 04, 2015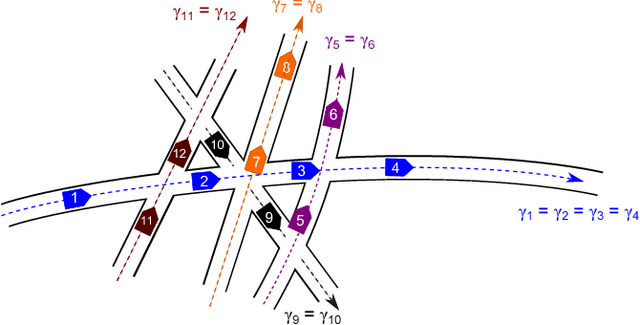
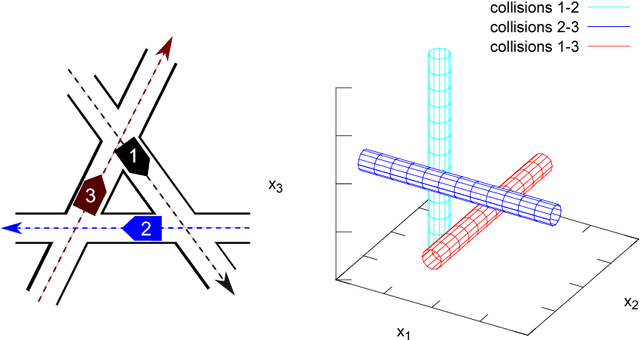
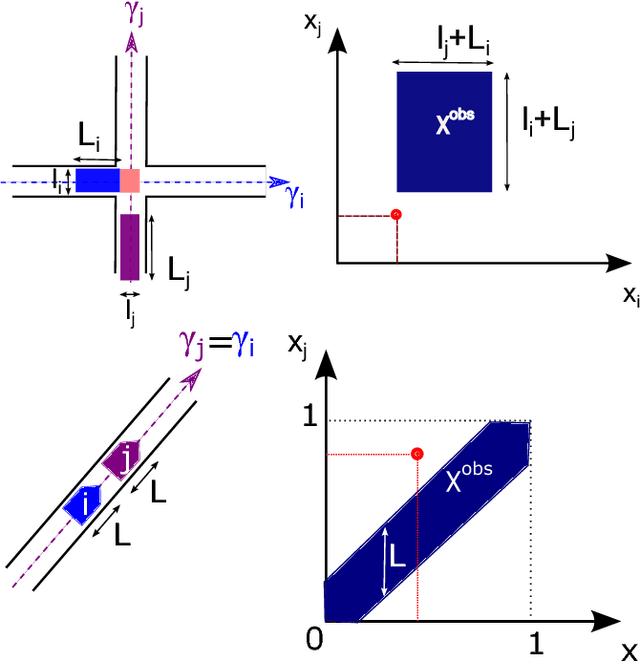
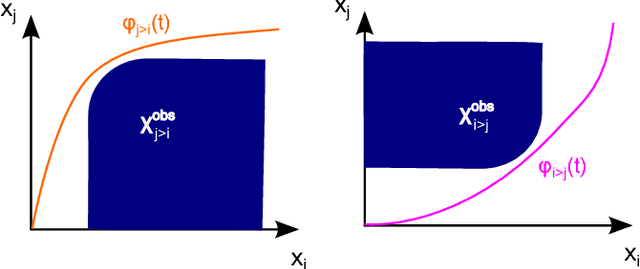
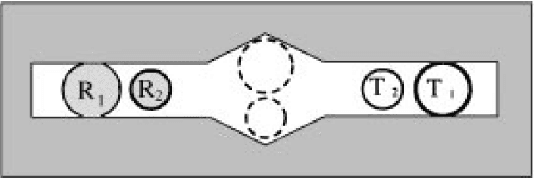
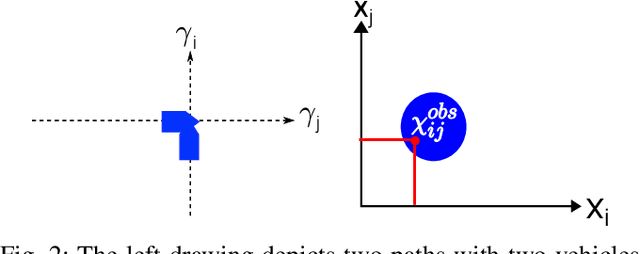
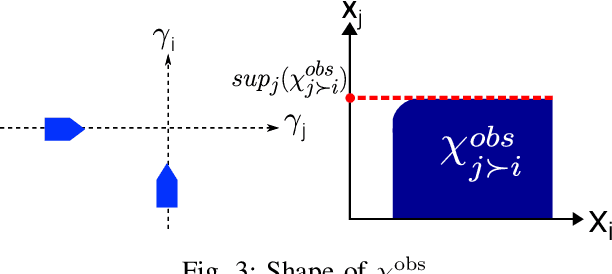
We study the problem of coordinating multiple robots along fixed geometric paths. Our contribution is threefold. First we formalize the intuitive concept of priorities as a binary relation induced by a feasible coordination solution, without excluding the case of robots following each other on the same geometric path. Then we prove that two paths in the coordination space are continuously deformable into each other if and only if they induce the \emph{same priority graph}, that is, the priority graph uniquely encodes homotopy classes of coordination solutions. Finally, we give a simple control law allowing to safely navigate into homotopy classes \emph{under kinodynamic constraints} even in the presence of unexpected events, such as a sudden robot deceleration without notice. It appears the freedom within homotopy classes allows to much deviate from any pre-planned trajectory without ever colliding nor having to re-plan the assigned priorities.
Priority-based coordination of mobile robots
Oct 03, 2014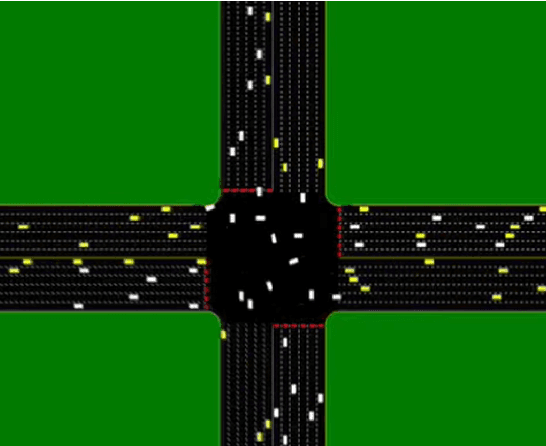
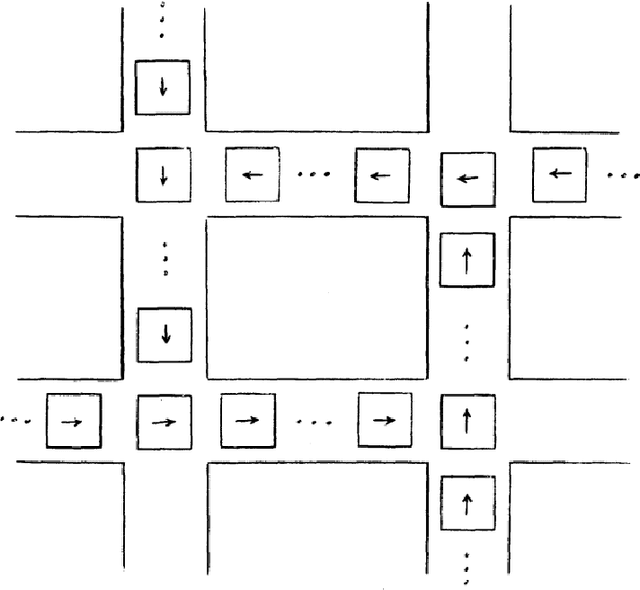
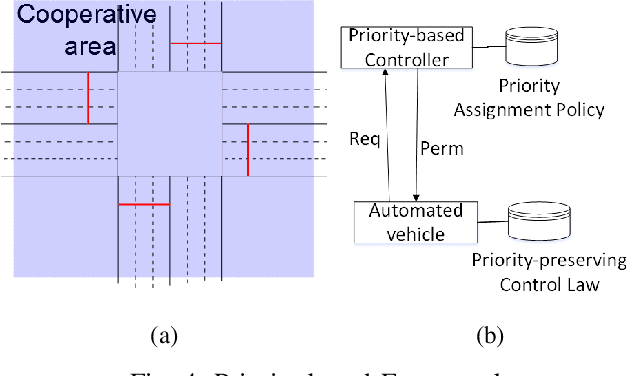
Since the end of the 1980's, the development of self-driven autonomous vehicles is an intensive research area in most major industrial countries. Positive socio-economic potential impacts include a decrease of crashes, a reduction of travel times, energy efficiency improvements, and a reduced need of costly physical infrastructure. Some form of vehicle-to-vehicle and/or vehicle-to-infrastructure cooperation is required to ensure a safe and efficient global transportation system. This thesis deals with a particular form of cooperation by studying the problem of coordinating multiple mobile robots at an intersection area. Most of coordination systems proposed in previous work consist in planning a trajectory and to control the robots along the planned trajectory: that is the plan-as-program paradigm where planning is considered as a generative mechanism of action. The approach of the thesis is to plan priorities -- the relative order of robots to go through the intersection -- which is much weaker as many trajectories respect the same priorities. More precisely, priorities encode the homotopy classes of solutions to the coordination problem. Priority assignment is equivalent to the choice of some homotopy class to solve the coordination problem instead of a particular trajectory. Once priorities are assigned, robots are controlled through a control law preserving the assigned priorities, i.e., ensuring the described trajectory belongs to the chosen homotopy class. It results in a more robust coordination system -- able to handle a large class of unexpected events in a reactive manner -- particularly well adapted for an application to the coordination of autonomous vehicles at intersections where cars, public transport and pedestrians share the road.
Priority-based coordination of autonomous and legacy vehicles at intersection
Sep 26, 2014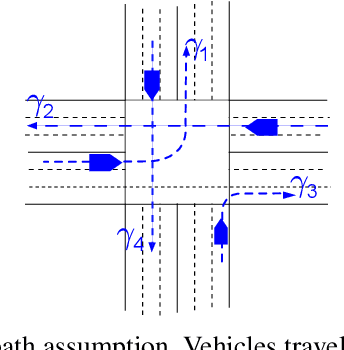
Recently, researchers have proposed various autonomous intersection management techniques that enable autonomous vehicles to cross the intersection without traffic lights or stop signs. In particular, a priority-based coordination system with provable collision-free and deadlock-free features has been presented. In this paper, we extend the priority-based approach to support legacy vehicles without compromising above-mentioned features. We make the hypothesis that legacy vehicles are able to keep a safe distance from their leading vehicles. Then we explore some special configurations of system that ensures the safe crossing of legacy vehicles. We implement the extended system in a realistic traffic simulator SUMO. Simulations are performed to demonstrate the safety of the system.
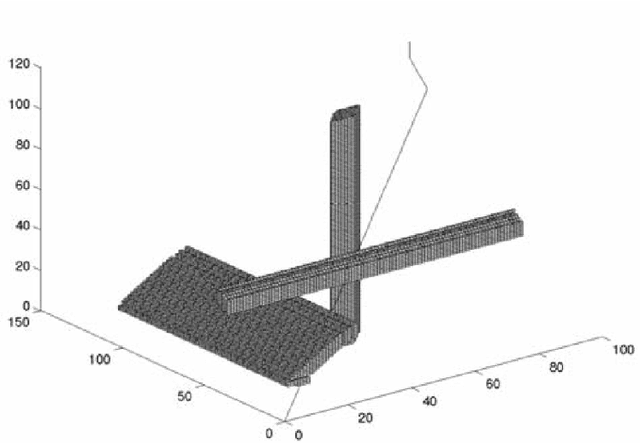
Priority-based intersection management with kinodynamic constraints
May 05, 2014
We consider the problem of coordinating a collection of robots at an intersection area taking into account dynamical constraints due to actuator limitations. We adopt the coordination space approach, which is standard in multiple robot motion planning. Assuming the priorities between robots are assigned in advance and the existence of a collision-free trajectory respecting those priorities, we propose a provably safe trajectory planner satisfying kinodynamic constraints. The algorithm is shown to run in real time and to return safe (collision-free) trajectories. Simulation results on synthetic data illustrate the benefits of the approach.