 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProvably Safe and Deadlock-Free Execution of Multi-Robot Plans under Delaying Disturbances
Paper and Code
Mar 28, 2016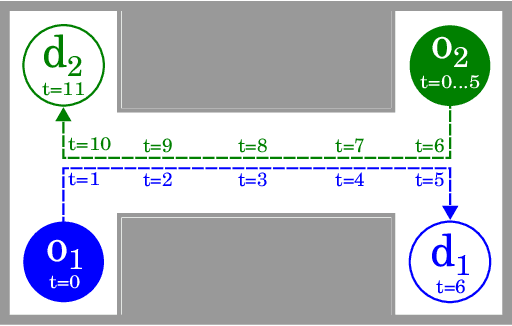
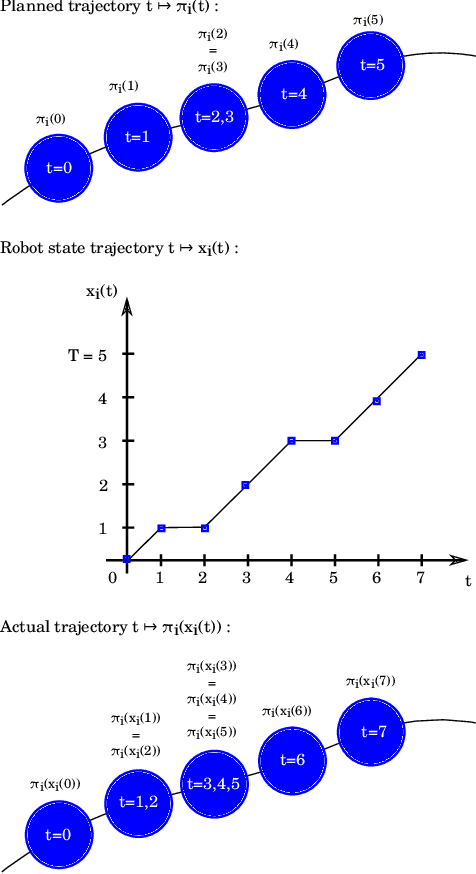
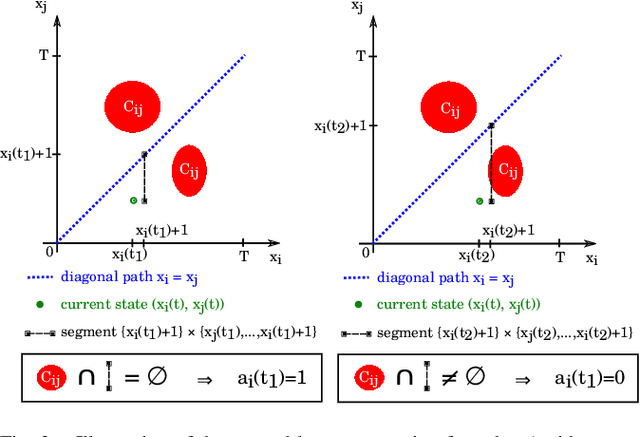
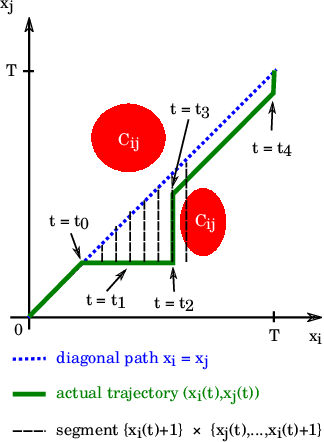
One of the standing challenges in multi-robot systems is the ability to reliably coordinate motions of multiple robots in environments where the robots are subject to disturbances. We consider disturbances that force the robot to temporarily stop and delay its advancement along its planned trajectory which can be used to model, e.g., passing-by humans for whom the robots have to yield. Although reactive collision-avoidance methods are often used in this context, they may lead to deadlocks between robots. We design a multi-robot control strategy for executing coordinated trajectories computed by a multi-robot trajectory planner and give a proof that the strategy is safe and deadlock-free even when robots are subject to delaying disturbances. Our simulations show that the proposed strategy scales significantly better with the intensity of disturbances than the naive liveness-preserving approach. The empirical results further confirm that the proposed approach is more reliable and also more efficient than state-of-the-art reactive techniques.