 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePriority-based coordination of autonomous and legacy vehicles at intersection
Sep 26, 2014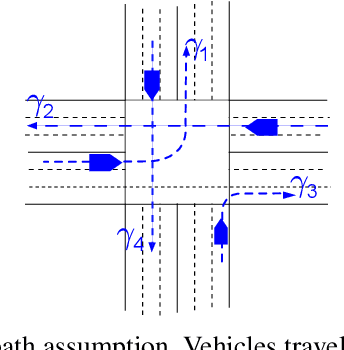
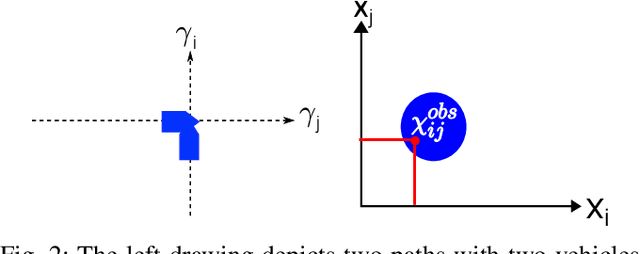
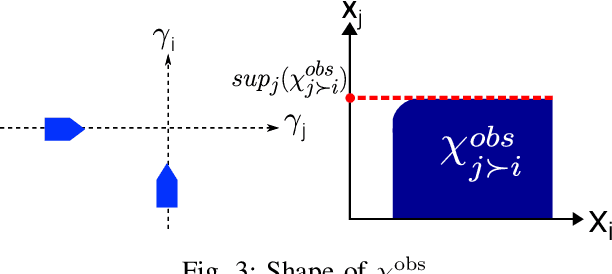
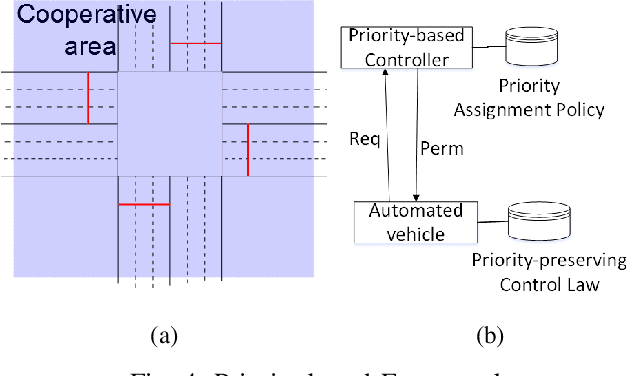
Recently, researchers have proposed various autonomous intersection management techniques that enable autonomous vehicles to cross the intersection without traffic lights or stop signs. In particular, a priority-based coordination system with provable collision-free and deadlock-free features has been presented. In this paper, we extend the priority-based approach to support legacy vehicles without compromising above-mentioned features. We make the hypothesis that legacy vehicles are able to keep a safe distance from their leading vehicles. Then we explore some special configurations of system that ensures the safe crossing of legacy vehicles. We implement the extended system in a realistic traffic simulator SUMO. Simulations are performed to demonstrate the safety of the system.
Cybercars : Past, Present and Future of the Technology
Oct 20, 2005
Automobile has become the dominant transport mode in the world in the last century. In order to meet a continuously growing demand for transport, one solution is to change the control approach for vehicle to full driving automation, which removes the driver from the control loop to improve efficiency and reduce accidents. Recent work shows that there are several realistic paths towards this deployment : driving assistance on passenger cars, automated commercial vehicles on dedicated infrastructures, and new forms of urban transport (car-sharing and cybercars). Cybercars have already been put into operation in Europe, and it seems that this approach could lead the way towards full automation on most urban, and later interurban infrastructures. The European project CyberCars has brought many improvements in the technology needed to operate cybercars over the last three years. A new, larger European project is now being prepared to carry this work further in order to meet more ambitious objectives in terms of safety and efficiency. This paper will present past and present technologies and will focus on the future developments.