 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk Assessment Algorithms Based On Recursive Neural Networks
May 04, 2007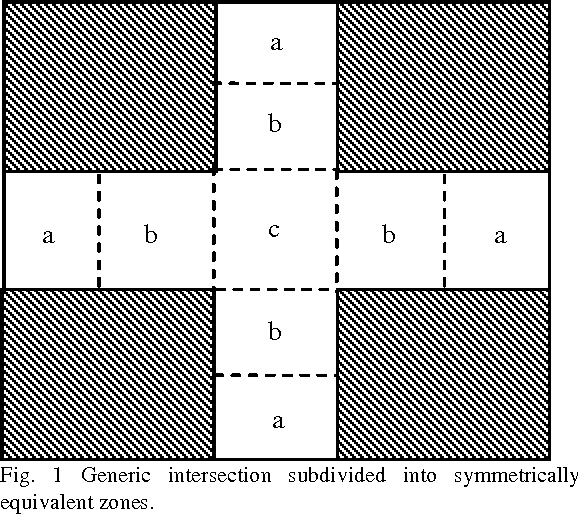
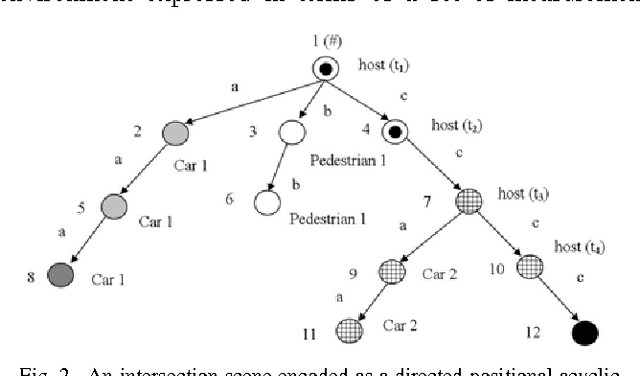
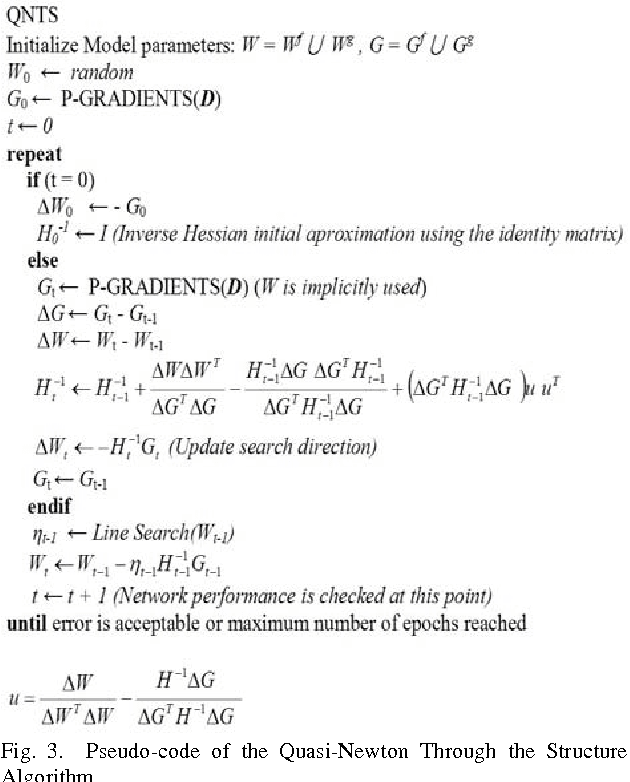
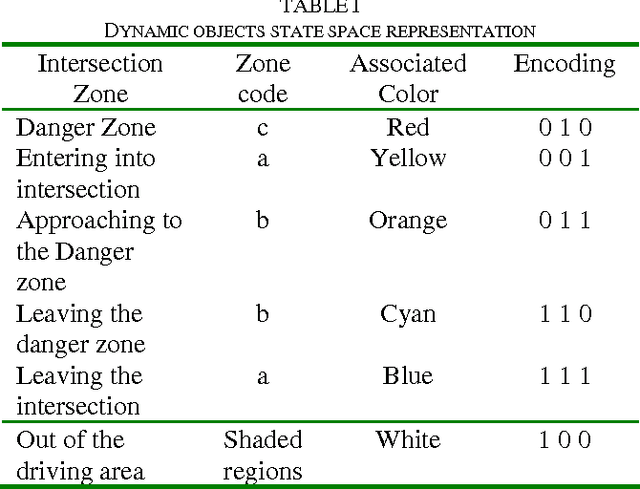
The assessment of highly-risky situations at road intersections have been recently revealed as an important research topic within the context of the automotive industry. In this paper we shall introduce a novel approach to compute risk functions by using a combination of a highly non-linear processing model in conjunction with a powerful information encoding procedure. Specifically, the elements of information either static or dynamic that appear in a road intersection scene are encoded by using directed positional acyclic labeled graphs. The risk assessment problem is then reformulated in terms of an inductive learning task carried out by a recursive neural network. Recursive neural networks are connectionist models capable of solving supervised and non-supervised learning problems represented by directed ordered acyclic graphs. The potential of this novel approach is demonstrated through well predefined scenarios. The major difference of our approach compared to others is expressed by the fact of learning the structure of the risk. Furthermore, the combination of a rich information encoding procedure with a generalized model of dynamical recurrent networks permit us, as we shall demonstrate, a sophisticated processing of information that we believe as being a first step for building future advanced intersection safety systems
New Technologies for Sustainable Urban Transport in Europe
Jan 10, 2006
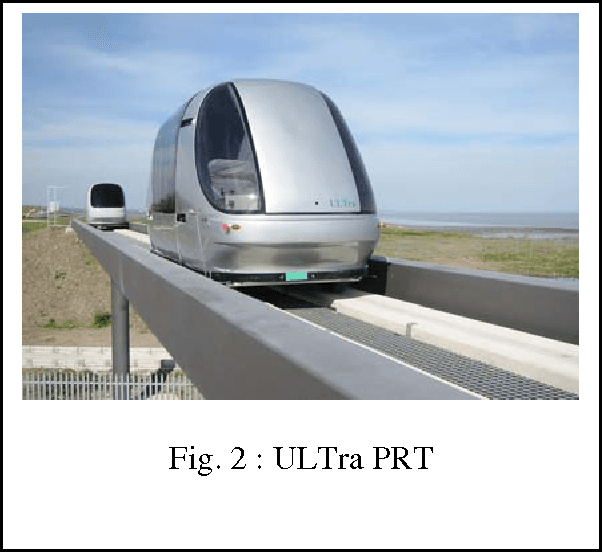
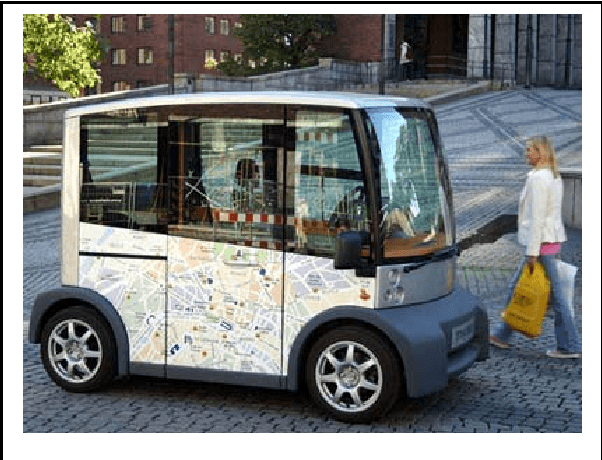
In the past few years, the European Commission has financed several projects to examine how new technologies could improve the sustainability of European cities. These technologies concern new public transportation modes such as guided buses to form high capacity networks similar to light rail but at a lower cost and better flexibility, PRT (Personal Rapid Transit) and cybercars (small urban vehicles with fully automatic driving capabilities to be used in carsharing mode, mostly as a complement to mass transport). They also concern private vehicles with technologies which could improve the efficiency of the vehicles as well as their safety (Intelligent Speed Adaptation, Adaptive Cruise >.Control, Stop&Go, Lane Keeping,...) and how these new vehicles can complement mass transport in the form of car-sharing services.
Applying Evolutionary Optimisation to Robot Obstacle Avoidance
Oct 25, 2005



This paper presents an artificial evolutionbased method for stereo image analysis and its application to real-time obstacle detection and avoidance for a mobile robot. It uses the Parisian approach, which consists here in splitting the representation of the robot's environment into a large number of simple primitives, the "flies", which are evolved following a biologically inspired scheme and give a fast, low-cost solution to the obstacle detection problem in mobile robotics.
Cybercars : Past, Present and Future of the Technology
Oct 20, 2005
Automobile has become the dominant transport mode in the world in the last century. In order to meet a continuously growing demand for transport, one solution is to change the control approach for vehicle to full driving automation, which removes the driver from the control loop to improve efficiency and reduce accidents. Recent work shows that there are several realistic paths towards this deployment : driving assistance on passenger cars, automated commercial vehicles on dedicated infrastructures, and new forms of urban transport (car-sharing and cybercars). Cybercars have already been put into operation in Europe, and it seems that this approach could lead the way towards full automation on most urban, and later interurban infrastructures. The European project CyberCars has brought many improvements in the technology needed to operate cybercars over the last three years. A new, larger European project is now being prepared to carry this work further in order to meet more ambitious objectives in terms of safety and efficiency. This paper will present past and present technologies and will focus on the future developments.