 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Algorithm for Supervised Driving of Cooperative Semi-Autonomous Vehicles (Extended)
Jun 25, 2017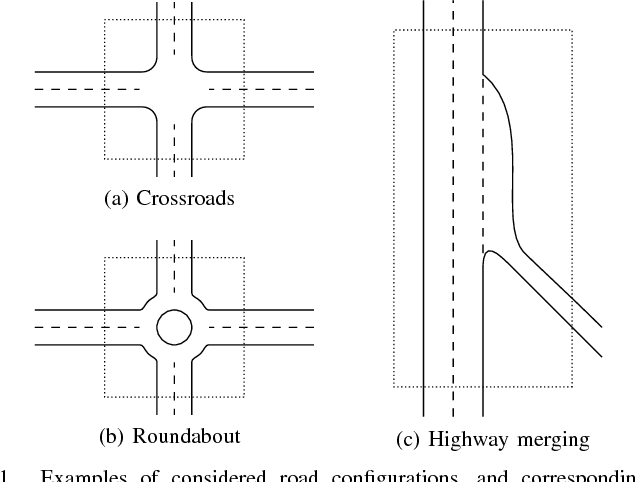
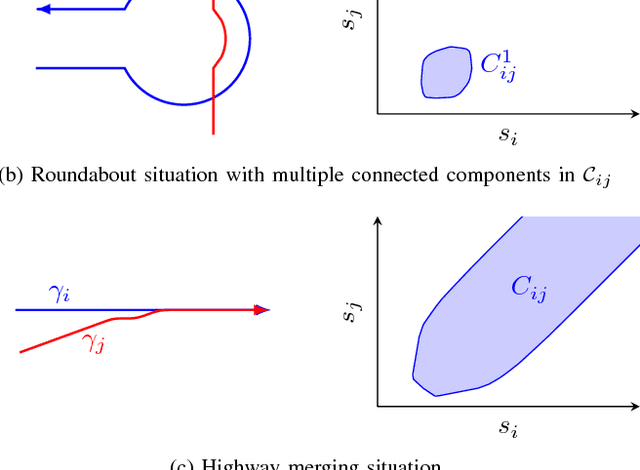
Before reaching full autonomy, vehicles will gradually be equipped with more and more advanced driver assistance systems (ADAS), effectively rendering them semi-autonomous. However, current ADAS technologies seem unable to handle complex traffic situations, notably when dealing with vehicles arriving from the sides, either at intersections or when merging on highways. The high rate of accidents in these settings prove that they constitute difficult driving situations. Moreover, intersections and merging lanes are often the source of important traffic congestion and, sometimes, deadlocks. In this article, we propose a cooperative framework to safely coordinate semi-autonomous vehicles in such settings, removing the risk of collision or deadlocks while remaining compatible with human driving. More specifically, we present a supervised coordination scheme that overrides control inputs from human drivers when they would result in an unsafe or blocked situation. To avoid unnecessary intervention and remain compatible with human driving, overriding only occurs when collisions or deadlocks are imminent. In this case, safe overriding controls are chosen while ensuring they deviate minimally from those originally requested by the drivers. Simulation results based on a realistic physics simulator show that our approach is scalable to real-world scenarios, and computations can be performed in real-time on a standard computer for up to a dozen simultaneous vehicles.
Time-optimal Coordination of Mobile Robots along Specified Paths
Apr 05, 2017
In this paper, we address the problem of time-optimal coordination of mobile robots under kinodynamic constraints along specified paths. We propose a novel approach based on time discretization that leads to a mixed-integer linear programming (MILP) formulation. This problem can be solved using general-purpose MILP solvers in a reasonable time, resulting in a resolution-optimal solution. Moreover, unlike previous work found in the literature, our formulation allows an exact linear modeling (up to the discretization resolution) of second-order dynamic constraints. Extensive simulations are performed to demonstrate the effectiveness of our approach.
A Distributed Model Predictive Control Framework for Road-Following Formation Control of Car-like Vehicles (Extended Version)
Apr 29, 2016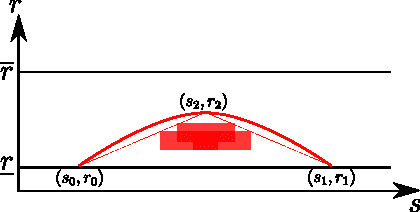
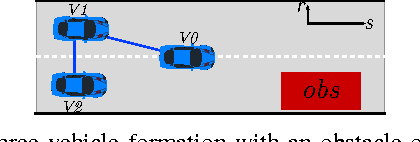
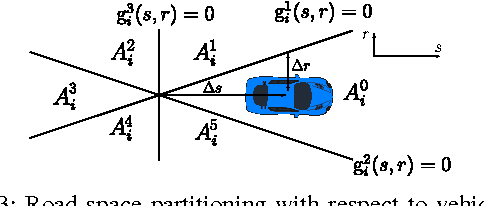

This work presents a novel framework for the formation control of multiple autonomous ground vehicles in an on-road environment. Unique challenges of this problem lie in 1) the design of collision avoidance strategies with obstacles and with other vehicles in a highly structured environment, 2) dynamic reconfiguration of the formation to handle different task specifications. In this paper, we design a local MPC-based tracking controller for each individual vehicle to follow a reference trajectory while satisfying various constraints (kinematics and dynamics, collision avoidance, \textit{etc.}). The reference trajectory of a vehicle is computed from its leader's trajectory, based on a pre-defined formation tree. We use logic rules to organize the collision avoidance behaviors of member vehicles. Moreover, we propose a methodology to safely reconfigure the formation on-the-fly. The proposed framework has been validated using high-fidelity simulations.
Priority-based coordination of autonomous and legacy vehicles at intersection
Sep 26, 2014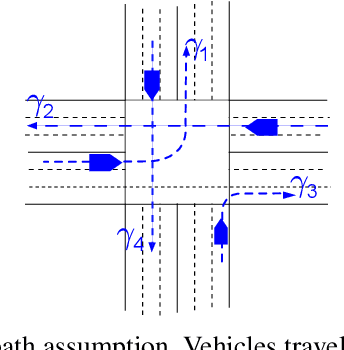
Recently, researchers have proposed various autonomous intersection management techniques that enable autonomous vehicles to cross the intersection without traffic lights or stop signs. In particular, a priority-based coordination system with provable collision-free and deadlock-free features has been presented. In this paper, we extend the priority-based approach to support legacy vehicles without compromising above-mentioned features. We make the hypothesis that legacy vehicles are able to keep a safe distance from their leading vehicles. Then we explore some special configurations of system that ensures the safe crossing of legacy vehicles. We implement the extended system in a realistic traffic simulator SUMO. Simulations are performed to demonstrate the safety of the system.