 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePriority-based coordination of autonomous and legacy vehicles at intersection
Paper and Code
Sep 26, 2014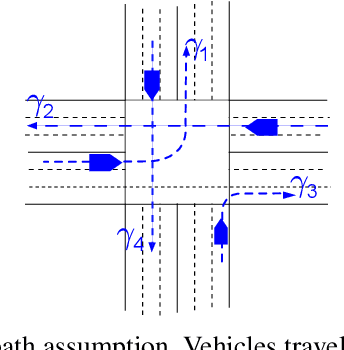
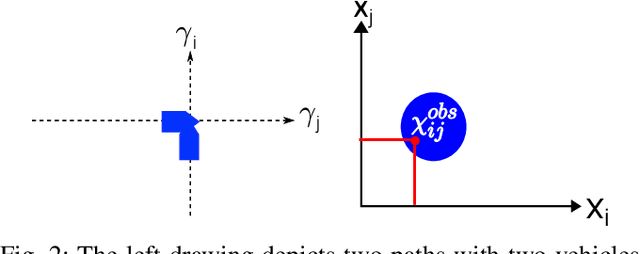
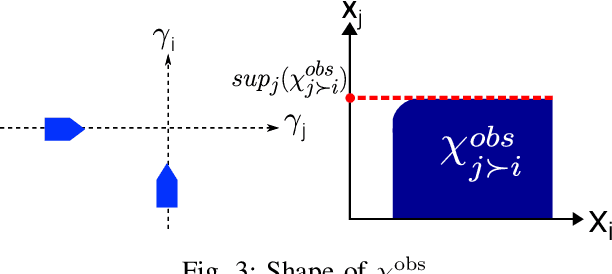
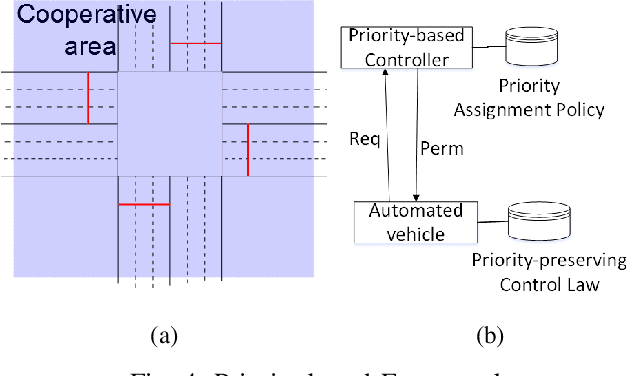
Recently, researchers have proposed various autonomous intersection management techniques that enable autonomous vehicles to cross the intersection without traffic lights or stop signs. In particular, a priority-based coordination system with provable collision-free and deadlock-free features has been presented. In this paper, we extend the priority-based approach to support legacy vehicles without compromising above-mentioned features. We make the hypothesis that legacy vehicles are able to keep a safe distance from their leading vehicles. Then we explore some special configurations of system that ensures the safe crossing of legacy vehicles. We implement the extended system in a realistic traffic simulator SUMO. Simulations are performed to demonstrate the safety of the system.