 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePriority-based coordination of mobile robots
Paper and Code
Oct 03, 2014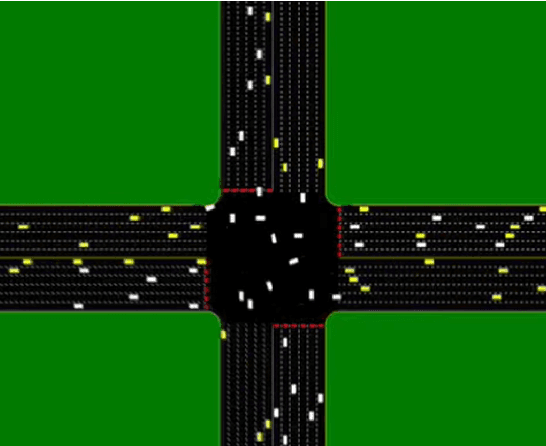
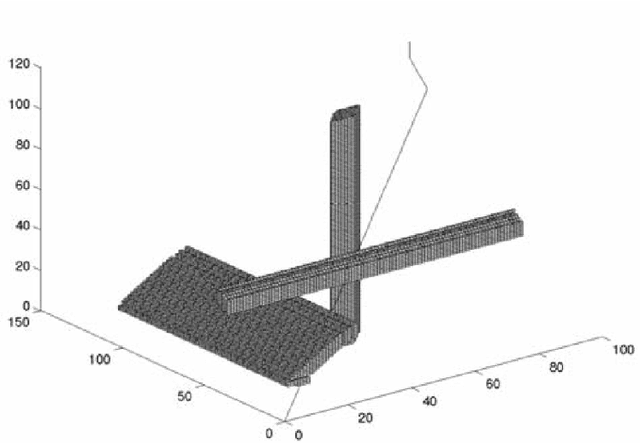
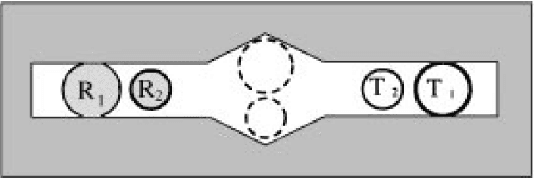
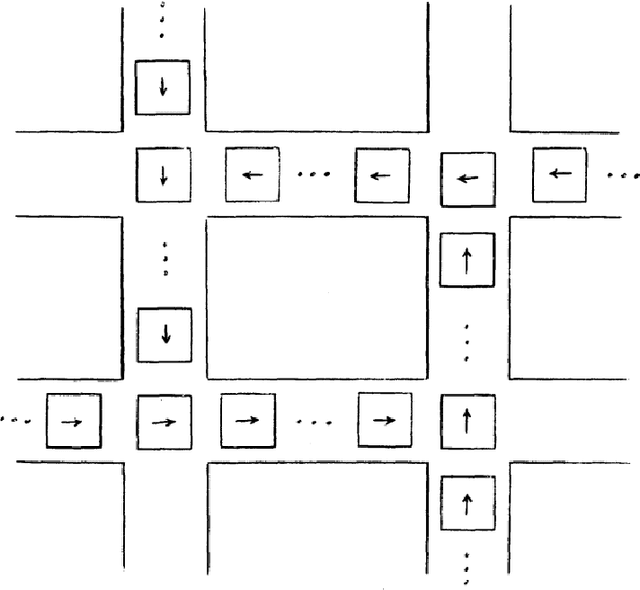
Since the end of the 1980's, the development of self-driven autonomous vehicles is an intensive research area in most major industrial countries. Positive socio-economic potential impacts include a decrease of crashes, a reduction of travel times, energy efficiency improvements, and a reduced need of costly physical infrastructure. Some form of vehicle-to-vehicle and/or vehicle-to-infrastructure cooperation is required to ensure a safe and efficient global transportation system. This thesis deals with a particular form of cooperation by studying the problem of coordinating multiple mobile robots at an intersection area. Most of coordination systems proposed in previous work consist in planning a trajectory and to control the robots along the planned trajectory: that is the plan-as-program paradigm where planning is considered as a generative mechanism of action. The approach of the thesis is to plan priorities -- the relative order of robots to go through the intersection -- which is much weaker as many trajectories respect the same priorities. More precisely, priorities encode the homotopy classes of solutions to the coordination problem. Priority assignment is equivalent to the choice of some homotopy class to solve the coordination problem instead of a particular trajectory. Once priorities are assigned, robots are controlled through a control law preserving the assigned priorities, i.e., ensuring the described trajectory belongs to the chosen homotopy class. It results in a more robust coordination system -- able to handle a large class of unexpected events in a reactive manner -- particularly well adapted for an application to the coordination of autonomous vehicles at intersections where cars, public transport and pedestrians share the road.