 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAV4EV: Open-Source Modular Autonomous Electric Vehicle Platform to Make Mobility Research Accessible
Dec 01, 2023


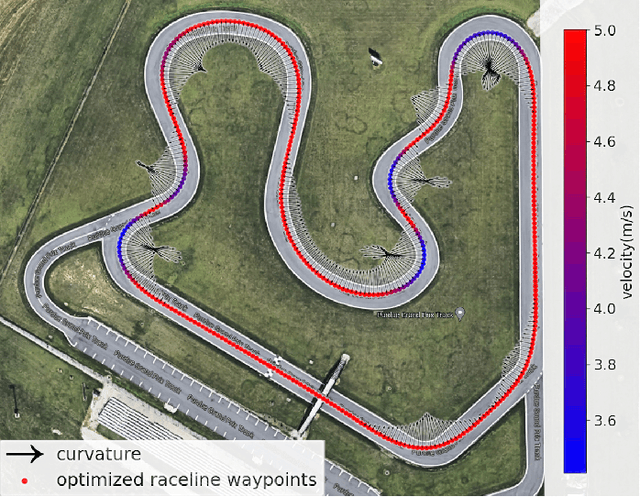
When academic researchers develop and validate autonomous driving algorithms, there is a challenge in balancing high-performance capabilities with the cost and complexity of the vehicle platform. Much of today's research on autonomous vehicles (AV) is limited to experimentation on expensive commercial vehicles that require large teams with diverse skills to retrofit the vehicles and test them in dedicated testing facilities. Testing the limits of safety and performance on such vehicles is costly and hazardous. It is also outside the reach of most academic departments and research groups. On the other hand, scaled-down 1/10th-1/16th scale vehicle platforms are more affordable but have limited similitude in dynamics, control, and drivability. To address this issue, we present the design of a one-third-scale autonomous electric go-kart platform with open-source mechatronics design along with fully-functional autonomous driving software. The platform's multi-modal driving system is capable of manual, autonomous, and teleoperation driving modes. It also features a flexible sensing suite for development and deployment of algorithms across perception, localization, planning, and control. This development serves as a bridge between full-scale vehicles and reduced-scale cars while accelerating cost-effective algorithmic advancements in autonomous systems research. Our experimental results demonstrate the AV4EV platform's capabilities and ease-of-use for developing new AV algorithms. All materials are available at AV4EV.org to stimulate collaborative efforts within the AV and electric vehicle (EV) communities.
On the Effectiveness of Image Manipulation Detection in the Age of Social Media
Apr 19, 2023Image manipulation detection algorithms designed to identify local anomalies often rely on the manipulated regions being ``sufficiently'' different from the rest of the non-tampered regions in the image. However, such anomalies might not be easily identifiable in high-quality manipulations, and their use is often based on the assumption that certain image phenomena are associated with the use of specific editing tools. This makes the task of manipulation detection hard in and of itself, with state-of-the-art detectors only being able to detect a limited number of manipulation types. More importantly, in cases where the anomaly assumption does not hold, the detection of false positives in otherwise non-manipulated images becomes a serious problem. To understand the current state of manipulation detection, we present an in-depth analysis of deep learning-based and learning-free methods, assessing their performance on different benchmark datasets containing tampered and non-tampered samples. We provide a comprehensive study of their suitability for detecting different manipulations as well as their robustness when presented with non-tampered data. Furthermore, we propose a novel deep learning-based pre-processing technique that accentuates the anomalies present in manipulated regions to make them more identifiable by a variety of manipulation detection methods. To this end, we introduce an anomaly enhancement loss that, when used with a residual architecture, improves the performance of different detection algorithms with a minimal introduction of false positives on the non-manipulated data. Lastly, we introduce an open-source manipulation detection toolkit comprising a number of standard detection algorithms.