 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFC$^3$: Feasibility-Based Control Chain Coordination
May 09, 2022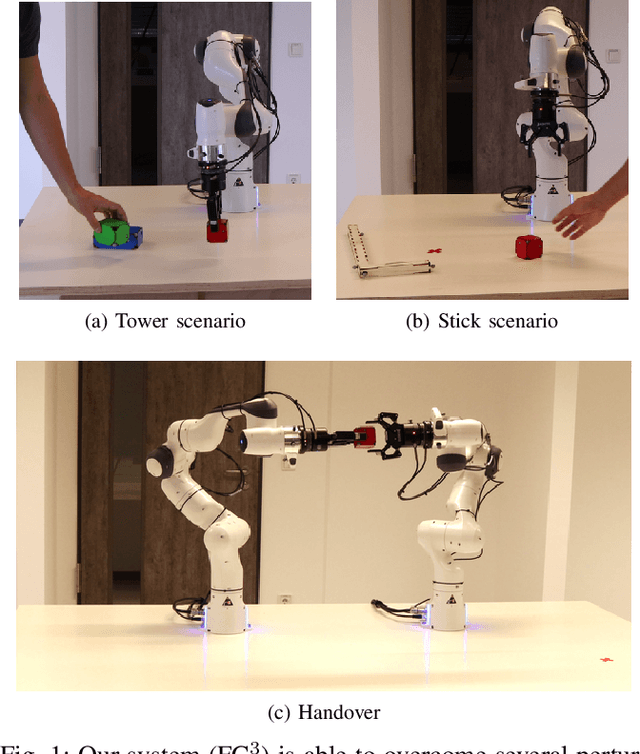
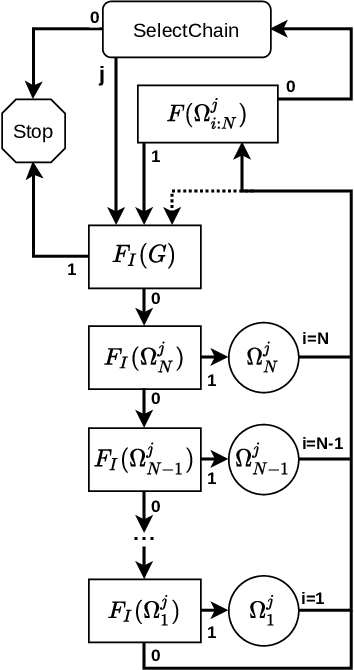
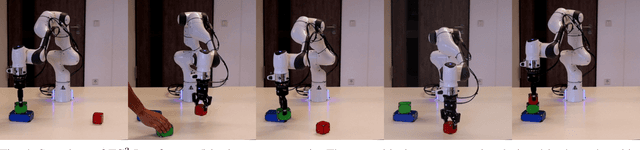
Hierarchical coordination of controllers often uses symbolic state representations that fully abstract their underlying low-level controllers, treating them as "black boxes" to the symbolic action abstraction. This paper proposes a framework to realize robust behavior, which we call Feasibility-based Control Chain Coordination (FC$^3$). Our controllers expose the geometric features and constraints they operate on. Based on this, FC$^3$ can reason over the controllers' feasibility and their sequence feasibility. For a given task, FC$^3$ first automatically constructs a library of potential controller chains using a symbolic action tree, which is then used to coordinate controllers in a chain, evaluate task feasibility, as well as switching between controller chains if necessary. In several real-world experiments we demonstrate FC$^3$'s robustness and awareness of the task's feasibility through its own actions and gradual responses to different interferences.
Sequence-of-Constraints MPC: Reactive Timing-Optimal Control of Sequential Manipulation
Mar 10, 2022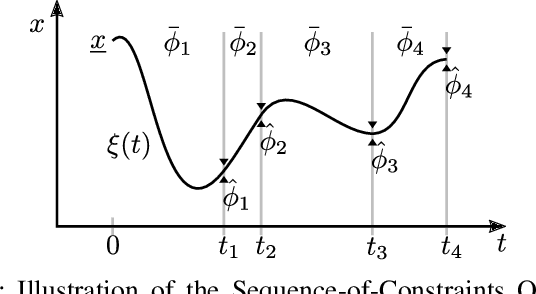
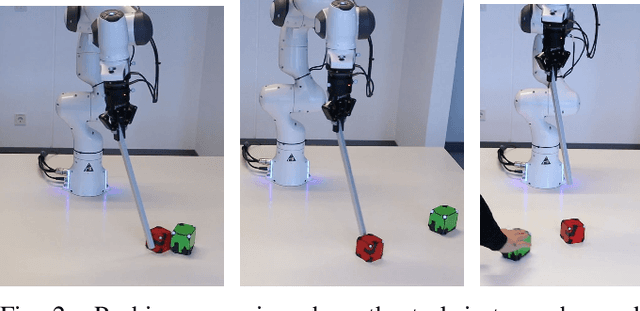
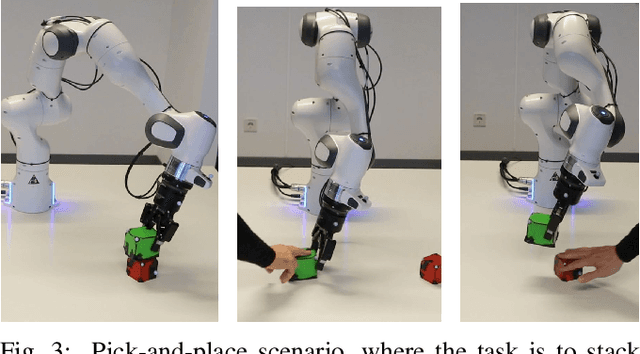
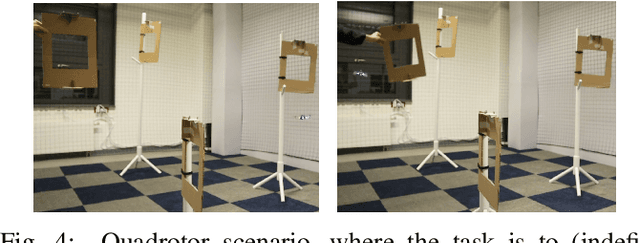
Task and Motion Planning has made great progress in solving hard sequential manipulation problems. However, a gap between such planning formulations and control methods for reactive execution remains. In this paper we propose a model predictive control approach dedicated to robustly execute a single sequence of constraints, which corresponds to a discrete decision sequence of a TAMP plan. We decompose the overall control problem into three sub-problems (solving for sequential waypoints, their timing, and a short receding horizon path) that each is a non-linear program solved online in each MPC cycle. The resulting control strategy can account for long-term interdependencies of constraints and reactively plan for a timing-optimal transition through all constraints. We additionally propose phase backtracking when running constraints are missed, leading to a fluent re-initiation behavior that is robust to perturbations and interferences by an experimenter.
RBO Hand 3 -- A Platform for Soft Dexterous Manipulation
Jan 26, 2022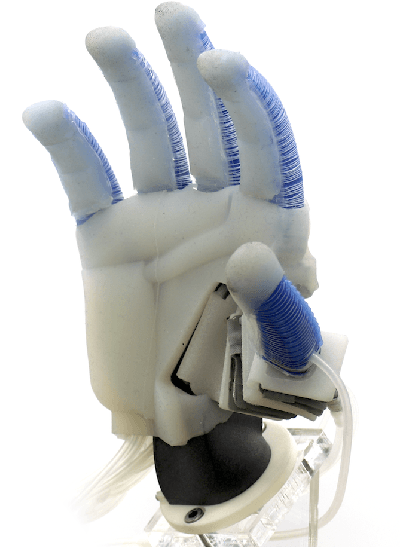
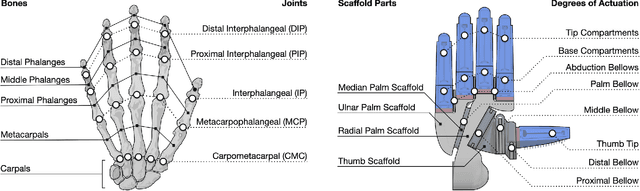
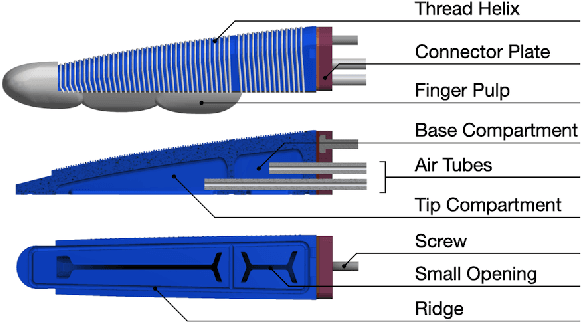
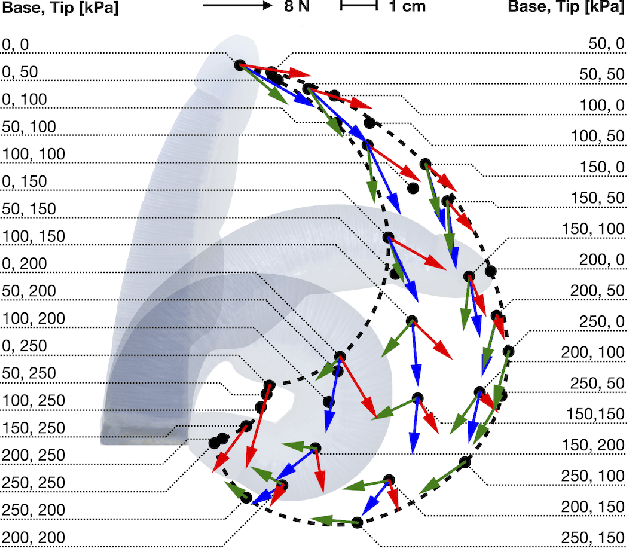
We present the RBO Hand 3, a highly capable and versatile anthropomorphic soft hand based on pneumatic actuation. The RBO Hand 3 is designed to enable dexterous manipulation, to facilitate transfer of insights about human dexterity, and to serve as a robust research platform for extensive real-world experiments. It achieves these design goals by combining many degrees of actuation with intrinsic compliance, replicating relevant functioning of the human hand, and by combining robust components in a modular design. The RBO Hand 3 possesses 16 independent degrees of actuation, implemented in a dexterous opposable thumb, two-chambered fingers, an actuated palm, and the ability to spread the fingers. In this work, we derive the design objectives that are based on experimentation with the hand's predecessors, observations about human grasping, and insights about principles of dexterity. We explain in detail how the design features of the RBO Hand 3 achieve these goals and evaluate the hand by demonstrating its ability to achieve the highest possible score in the Kapandji test for thumb opposition, to realize all 33 grasp types of the comprehensive GRASP taxonomy, to replicate common human grasping strategies, and to perform dexterous in-hand manipulation.