 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequence-of-Constraints MPC: Reactive Timing-Optimal Control of Sequential Manipulation
Paper and Code
Mar 10, 2022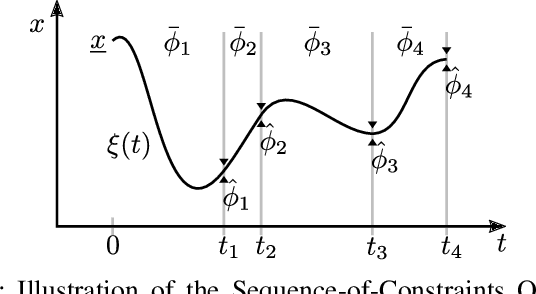
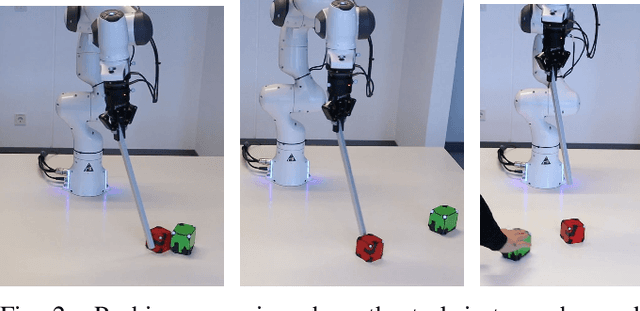
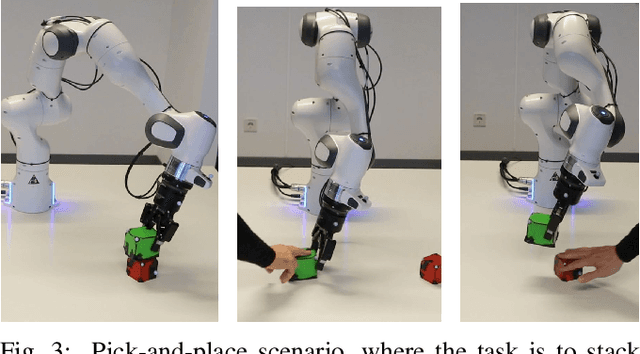
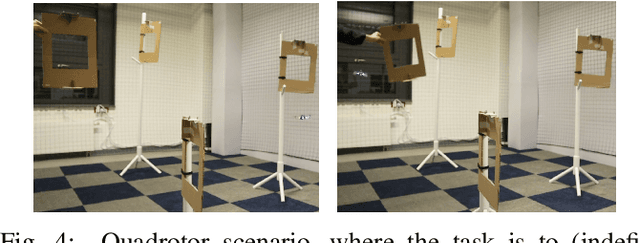
Task and Motion Planning has made great progress in solving hard sequential manipulation problems. However, a gap between such planning formulations and control methods for reactive execution remains. In this paper we propose a model predictive control approach dedicated to robustly execute a single sequence of constraints, which corresponds to a discrete decision sequence of a TAMP plan. We decompose the overall control problem into three sub-problems (solving for sequential waypoints, their timing, and a short receding horizon path) that each is a non-linear program solved online in each MPC cycle. The resulting control strategy can account for long-term interdependencies of constraints and reactively plan for a timing-optimal transition through all constraints. We additionally propose phase backtracking when running constraints are missed, leading to a fluent re-initiation behavior that is robust to perturbations and interferences by an experimenter.