 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurprisingly Robust In-Hand Manipulation: An Empirical Study
Jan 27, 2022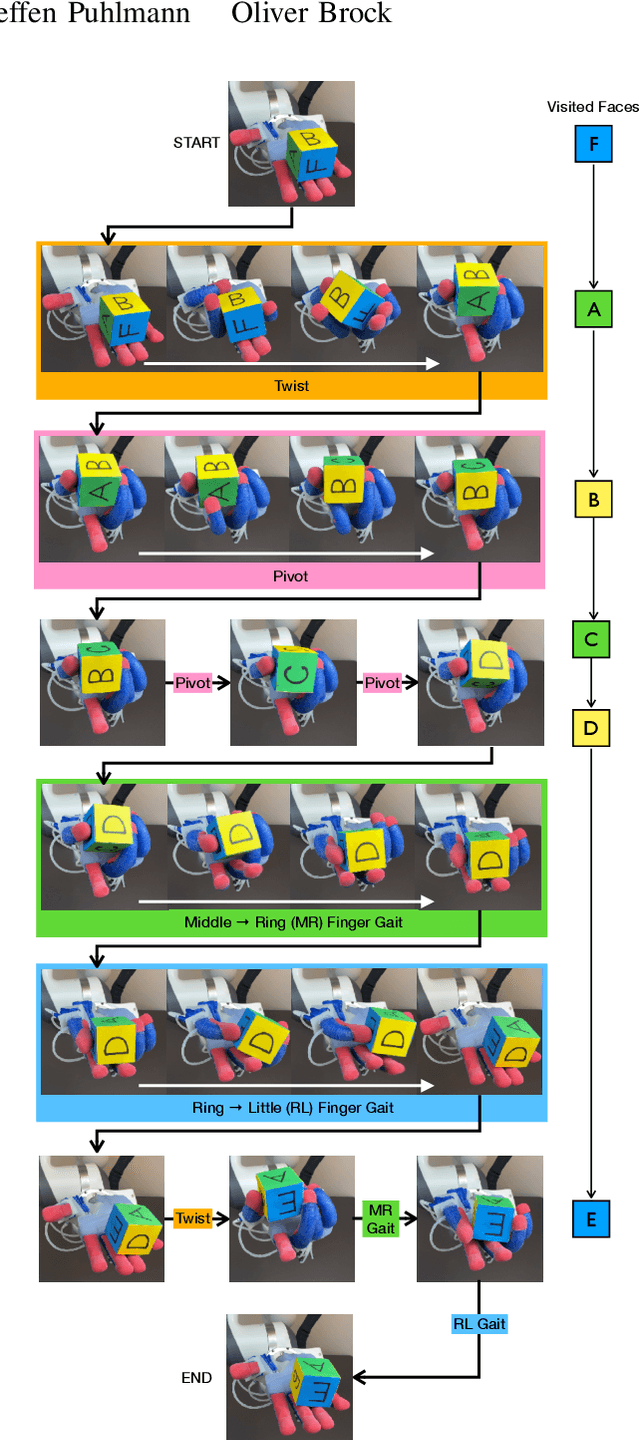
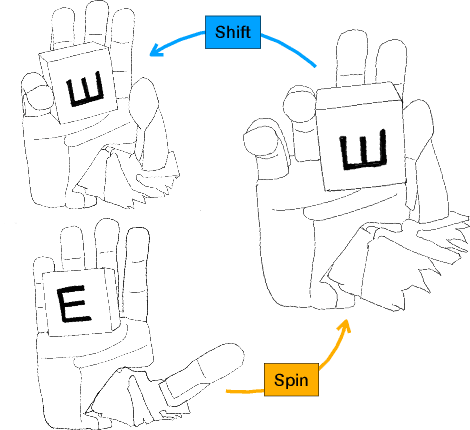

We present in-hand manipulation skills on a dexterous, compliant, anthropomorphic hand. Even though these skills were derived in a simplistic manner, they exhibit surprising robustness to variations in shape, size, weight, and placement of the manipulated object. They are also very insensitive to variation of execution speeds, ranging from highly dynamic to quasi-static. The robustness of the skills leads to compositional properties that enable extended and robust manipulation programs. To explain the surprising robustness of the in-hand manipulation skills, we performed a detailed, empirical analysis of the skills' performance. From this analysis, we identify three principles for skill design: 1) Exploiting the hardware's innate ability to drive hard-to-model contact dynamics. 2) Taking actions to constrain these interactions, funneling the system into a narrow set of possibilities. 3) Composing such action sequences into complex manipulation programs. We believe that these principles constitute an important foundation for robust robotic in-hand manipulation, and possibly for manipulation in general.
* Published in Robotics: Science and Systems 2021. Proceedings at http://www.roboticsproceedings.org/rss17/p089.html Spotlight talk at https://youtu.be/2vwdP4WjGoQ Complete video playlist at https://www.youtube.com/playlist?list=PLb-CNILz7vmt6Ae_yD9i15TrCw0S8bKCn
RBO Hand 3 -- A Platform for Soft Dexterous Manipulation
Jan 26, 2022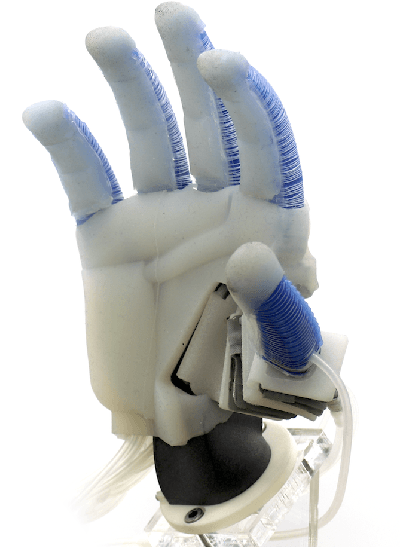
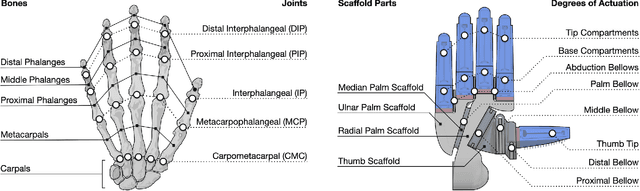
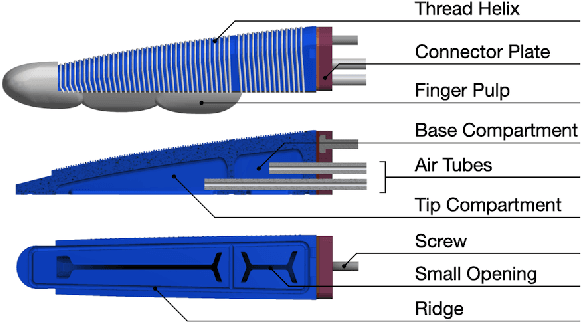
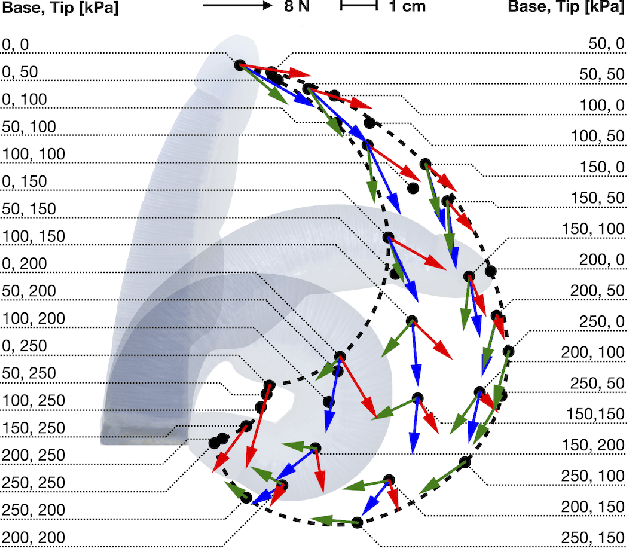
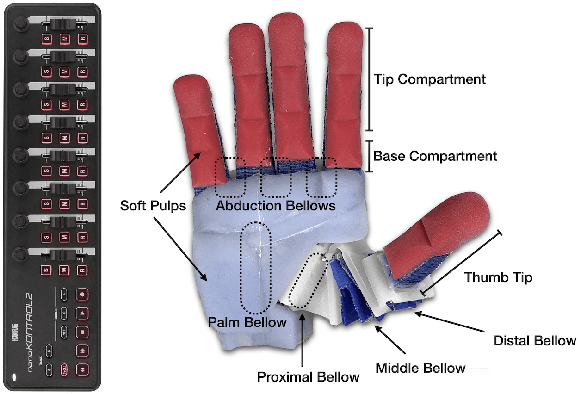
We present the RBO Hand 3, a highly capable and versatile anthropomorphic soft hand based on pneumatic actuation. The RBO Hand 3 is designed to enable dexterous manipulation, to facilitate transfer of insights about human dexterity, and to serve as a robust research platform for extensive real-world experiments. It achieves these design goals by combining many degrees of actuation with intrinsic compliance, replicating relevant functioning of the human hand, and by combining robust components in a modular design. The RBO Hand 3 possesses 16 independent degrees of actuation, implemented in a dexterous opposable thumb, two-chambered fingers, an actuated palm, and the ability to spread the fingers. In this work, we derive the design objectives that are based on experimentation with the hand's predecessors, observations about human grasping, and insights about principles of dexterity. We explain in detail how the design features of the RBO Hand 3 achieve these goals and evaluate the hand by demonstrating its ability to achieve the highest possible score in the Kapandji test for thumb opposition, to realize all 33 grasp types of the comprehensive GRASP taxonomy, to replicate common human grasping strategies, and to perform dexterous in-hand manipulation.
A Low-Cost, Easy-to-Manufacture, Flexible, Multi-Taxel Tactile Sensor and its Application to In-Hand Object Recognition
Nov 18, 2021
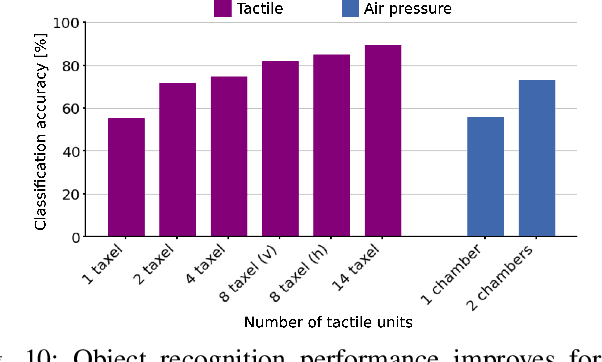
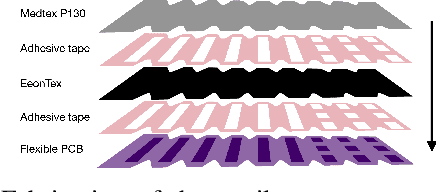
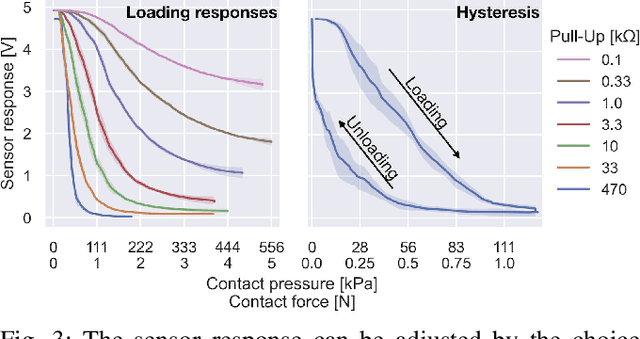
Soft robotics is an emerging field that yields promising results for tasks that require safe and robust interactions with the environment or with humans, such as grasping, manipulation, and human-robot interaction. Soft robots rely on intrinsically compliant components and are difficult to equip with traditional, rigid sensors which would interfere with their compliance. We propose a highly flexible tactile sensor that is low-cost and easy to manufacture while measuring contact pressures independently from 14 taxels. The sensor is built from piezoresistive fabric for highly sensitive, continuous responses and from a custom-designed flexible printed circuit board which provides a high taxel density. From these taxels, location and intensity of contact with the sensor can be inferred. In this paper, we explain the design and manufacturing of the proposed sensor, characterize its input-output relation, evaluate its effects on compliance when equipped to the silicone-based pneumatic actuators of the soft robotic RBO Hand 2, and demonstrate that the sensor provides rich and useful feedback for learning-based in-hand object recognition.