 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Low-Cost, Easy-to-Manufacture, Flexible, Multi-Taxel Tactile Sensor and its Application to In-Hand Object Recognition
Nov 18, 2021
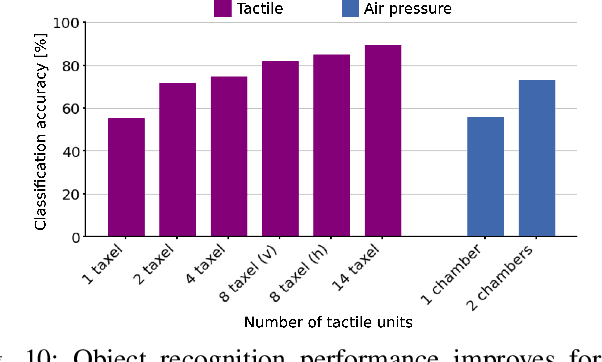
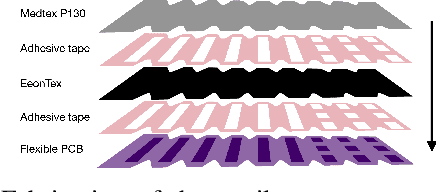
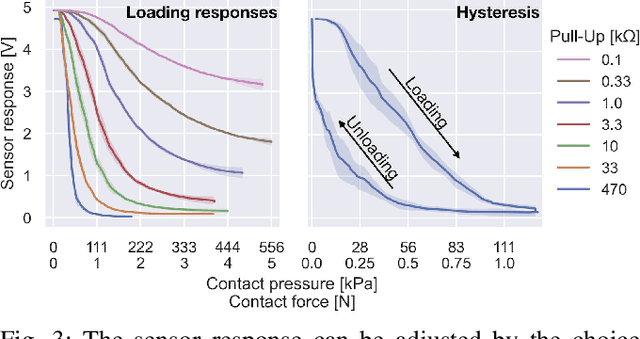
Soft robotics is an emerging field that yields promising results for tasks that require safe and robust interactions with the environment or with humans, such as grasping, manipulation, and human-robot interaction. Soft robots rely on intrinsically compliant components and are difficult to equip with traditional, rigid sensors which would interfere with their compliance. We propose a highly flexible tactile sensor that is low-cost and easy to manufacture while measuring contact pressures independently from 14 taxels. The sensor is built from piezoresistive fabric for highly sensitive, continuous responses and from a custom-designed flexible printed circuit board which provides a high taxel density. From these taxels, location and intensity of contact with the sensor can be inferred. In this paper, we explain the design and manufacturing of the proposed sensor, characterize its input-output relation, evaluate its effects on compliance when equipped to the silicone-based pneumatic actuators of the soft robotic RBO Hand 2, and demonstrate that the sensor provides rich and useful feedback for learning-based in-hand object recognition.