 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-Hand Cube Reconfiguration: Simplified
Aug 23, 2023We present a simple approach to in-hand cube reconfiguration. By simplifying planning, control, and perception as much as possible, while maintaining robust and general performance, we gain insights into the inherent complexity of in-hand cube reconfiguration. We also demonstrate the effectiveness of combining GOFAI-based planning with the exploitation of environmental constraints and inherently compliant end-effectors in the context of dexterous manipulation. The proposed system outperforms a substantially more complex system for cube reconfiguration based on deep learning and accurate physical simulation, contributing arguments to the discussion about what the most promising approach to general manipulation might be. Project website: https://rbo.gitlab-pages.tu-berlin.de/robotics/simpleIHM/
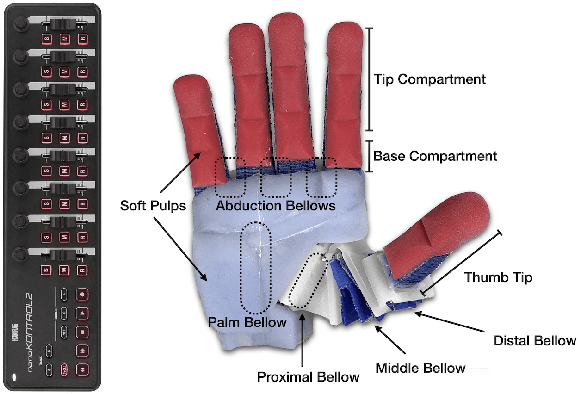
Dexterous Soft Hands Linearize Feedback-Control for In-Hand Manipulation
Aug 22, 2023This paper presents a feedback-control framework for in-hand manipulation (IHM) with dexterous soft hands that enables the acquisition of manipulation skills in the real-world within minutes. We choose the deformation state of the soft hand as the control variable. To control for a desired deformation state, we use coarsely approximated Jacobians of the actuation-deformation dynamics. These Jacobian are obtained via explorative actions. This is enabled by the self-stabilizing properties of compliant hands, which allow us to use linear feedback control in the presence of complex contact dynamics. To evaluate the effectiveness of our approach, we show the generalization capabilities for a learned manipulation skill to variations in object size by 100 %, 360 degree changes in palm inclination and to disabling up to 50 % of the involved actuators. In addition, complex manipulations can be obtained by sequencing such feedback-skills.
Surprisingly Robust In-Hand Manipulation: An Empirical Study
Jan 27, 2022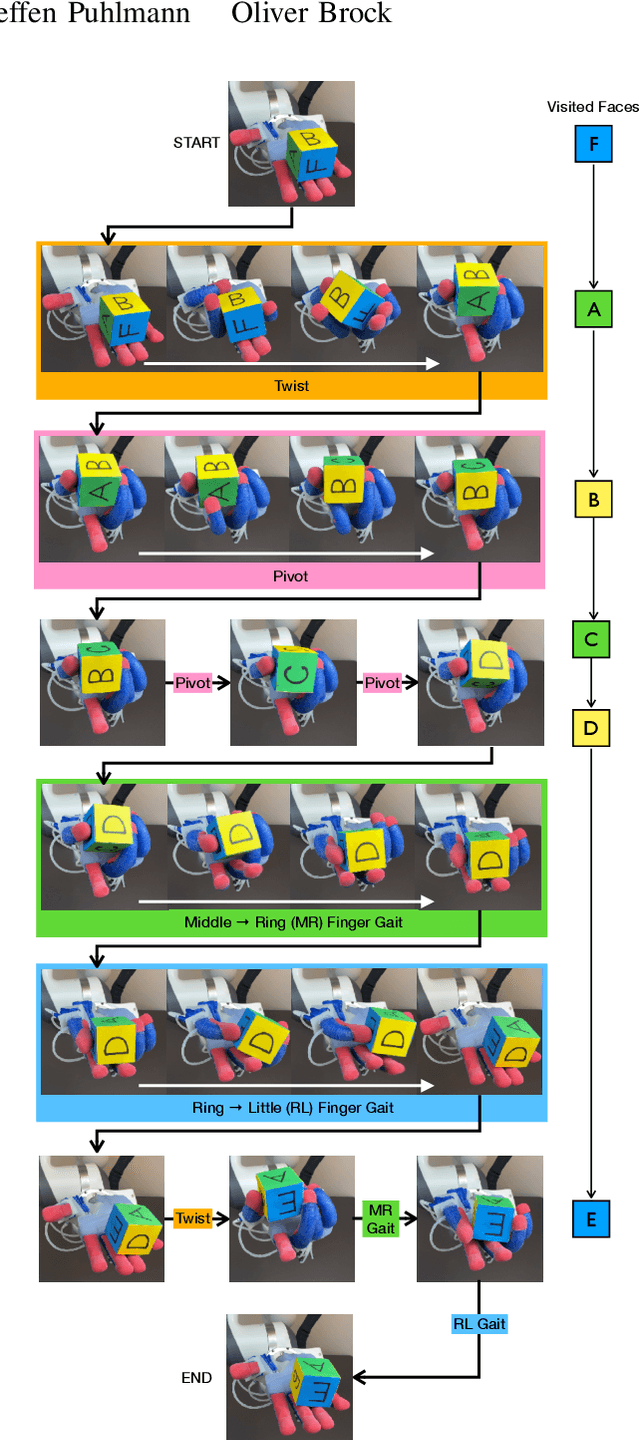
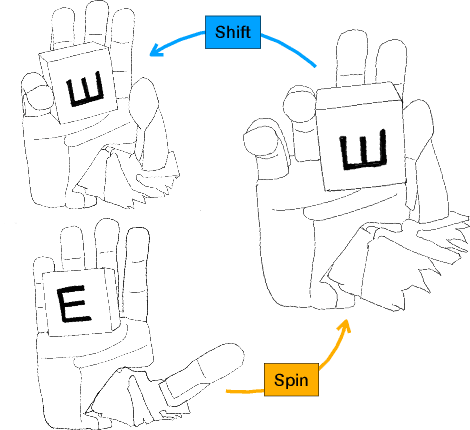

We present in-hand manipulation skills on a dexterous, compliant, anthropomorphic hand. Even though these skills were derived in a simplistic manner, they exhibit surprising robustness to variations in shape, size, weight, and placement of the manipulated object. They are also very insensitive to variation of execution speeds, ranging from highly dynamic to quasi-static. The robustness of the skills leads to compositional properties that enable extended and robust manipulation programs. To explain the surprising robustness of the in-hand manipulation skills, we performed a detailed, empirical analysis of the skills' performance. From this analysis, we identify three principles for skill design: 1) Exploiting the hardware's innate ability to drive hard-to-model contact dynamics. 2) Taking actions to constrain these interactions, funneling the system into a narrow set of possibilities. 3) Composing such action sequences into complex manipulation programs. We believe that these principles constitute an important foundation for robust robotic in-hand manipulation, and possibly for manipulation in general.
* Published in Robotics: Science and Systems 2021. Proceedings at http://www.roboticsproceedings.org/rss17/p089.html Spotlight talk at https://youtu.be/2vwdP4WjGoQ Complete video playlist at https://www.youtube.com/playlist?list=PLb-CNILz7vmt6Ae_yD9i15TrCw0S8bKCn