 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRBO Hand 3 -- A Platform for Soft Dexterous Manipulation
Paper and Code
Jan 26, 2022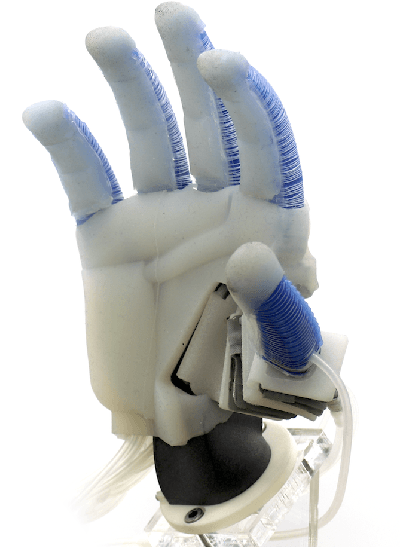
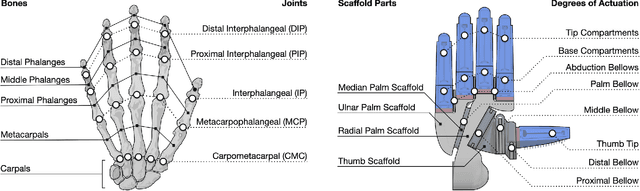
We present the RBO Hand 3, a highly capable and versatile anthropomorphic soft hand based on pneumatic actuation. The RBO Hand 3 is designed to enable dexterous manipulation, to facilitate transfer of insights about human dexterity, and to serve as a robust research platform for extensive real-world experiments. It achieves these design goals by combining many degrees of actuation with intrinsic compliance, replicating relevant functioning of the human hand, and by combining robust components in a modular design. The RBO Hand 3 possesses 16 independent degrees of actuation, implemented in a dexterous opposable thumb, two-chambered fingers, an actuated palm, and the ability to spread the fingers. In this work, we derive the design objectives that are based on experimentation with the hand's predecessors, observations about human grasping, and insights about principles of dexterity. We explain in detail how the design features of the RBO Hand 3 achieve these goals and evaluate the hand by demonstrating its ability to achieve the highest possible score in the Kapandji test for thumb opposition, to realize all 33 grasp types of the comprehensive GRASP taxonomy, to replicate common human grasping strategies, and to perform dexterous in-hand manipulation.