 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFC$^3$: Feasibility-Based Control Chain Coordination
Paper and Code
May 09, 2022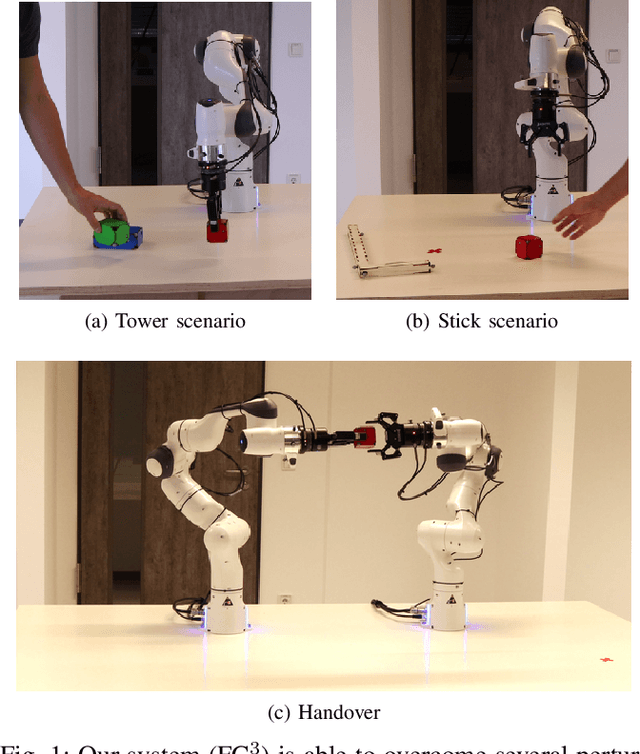
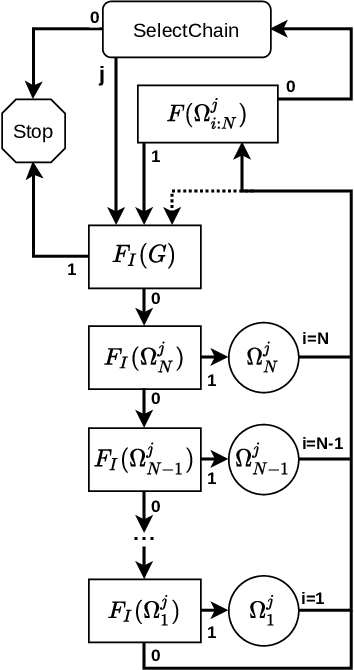
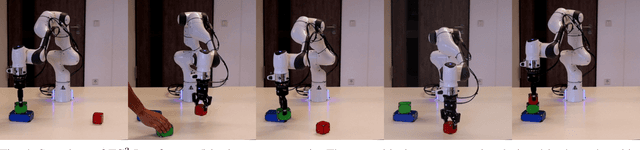
Hierarchical coordination of controllers often uses symbolic state representations that fully abstract their underlying low-level controllers, treating them as "black boxes" to the symbolic action abstraction. This paper proposes a framework to realize robust behavior, which we call Feasibility-based Control Chain Coordination (FC$^3$). Our controllers expose the geometric features and constraints they operate on. Based on this, FC$^3$ can reason over the controllers' feasibility and their sequence feasibility. For a given task, FC$^3$ first automatically constructs a library of potential controller chains using a symbolic action tree, which is then used to coordinate controllers in a chain, evaluate task feasibility, as well as switching between controller chains if necessary. In several real-world experiments we demonstrate FC$^3$'s robustness and awareness of the task's feasibility through its own actions and gradual responses to different interferences.