 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Approximate Edge AI for Energy Efficient Autonomous Driving Services
Apr 13, 2023Autonomous driving services rely heavily on sensors such as cameras, LiDAR, radar, and communication modules. A common practice of processing the sensed data is using a high-performance computing unit placed inside the vehicle, which deploys AI models and algorithms to act as the brain or administrator of the vehicle. The vehicular data generated from average hours of driving can be up to 20 Terabytes depending on the data rate and specification of the sensors. Given the scale and fast growth of services for autonomous driving, it is essential to improve the overall energy and environmental efficiency, especially in the trend towards vehicular electrification (e.g., battery-powered). Although the areas have seen significant advancements in sensor technologies, wireless communications, computing and AI/ML algorithms, the challenge still exists in how to apply and integrate those technology innovations to achieve energy efficiency. This survey reviews and compares the connected vehicular applications, vehicular communications, approximation and Edge AI techniques. The focus is on energy efficiency by covering newly proposed approximation and enabling frameworks. To the best of our knowledge, this survey is the first to review the latest approximate Edge AI frameworks and publicly available datasets in energy-efficient autonomous driving. The insights and vision from this survey can be beneficial for the collaborative driving service development on low-power and memory-constrained systems and also for the energy optimization of autonomous vehicles.
SURIMI: Supervised Radio Map Augmentation with Deep Learning and a Generative Adversarial Network for Fingerprint-based Indoor Positioning
Jul 13, 2022

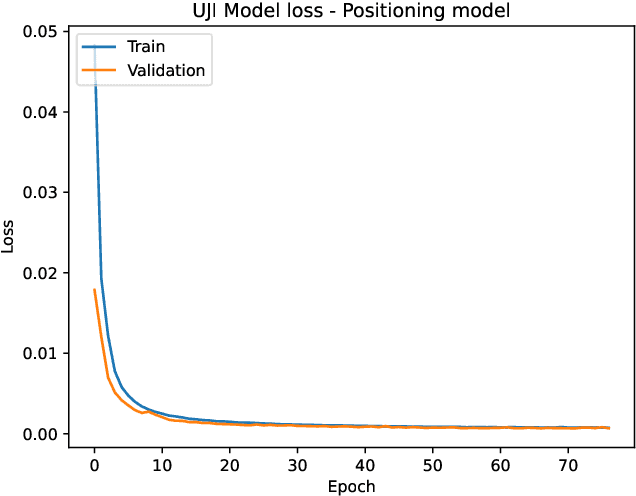

Indoor Positioning based on Machine Learning has drawn increasing attention both in the academy and the industry as meaningful information from the reference data can be extracted. Many researchers are using supervised, semi-supervised, and unsupervised Machine Learning models to reduce the positioning error and offer reliable solutions to the end-users. In this article, we propose a new architecture by combining Convolutional Neural Network (CNN), Long short-term memory (LSTM) and Generative Adversarial Network (GAN) in order to increase the training data and thus improve the position accuracy. The proposed combination of supervised and unsupervised models was tested in 17 public datasets, providing an extensive analysis of its performance. As a result, the positioning error has been reduced in more than 70% of them.
Fault-Tolerant Collaborative Inference through the Edge-PRUNE Framework
Jun 16, 2022


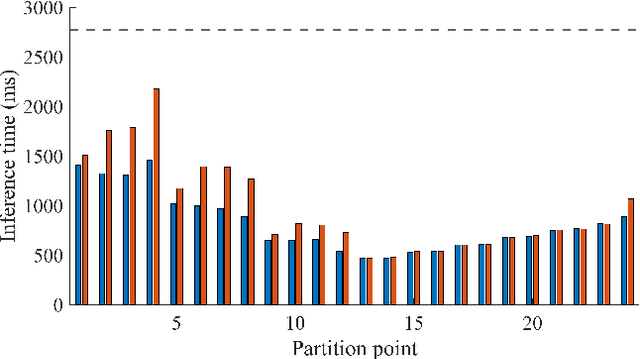
Collaborative inference has received significant research interest in machine learning as a vehicle for distributing computation load, reducing latency, as well as addressing privacy preservation in communications. Recent collaborative inference frameworks have adopted dynamic inference methodologies such as early-exit and run-time partitioning of neural networks. However, as machine learning frameworks scale in the number of inference inputs, e.g., in surveillance applications, fault tolerance related to device failure needs to be considered. This paper presents the Edge-PRUNE distributed computing framework, built on a formally defined model of computation, which provides a flexible infrastructure for fault tolerant collaborative inference. The experimental section of this work shows results on achievable inference time savings by collaborative inference, presents fault tolerant system topologies and analyzes their cost in terms of execution time overhead.
Data Cleansing for Indoor Positioning Wi-Fi Fingerprinting Datasets
May 04, 2022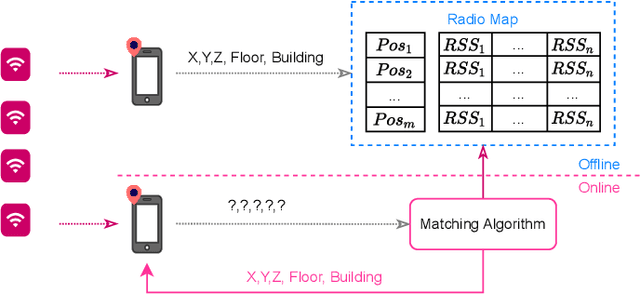
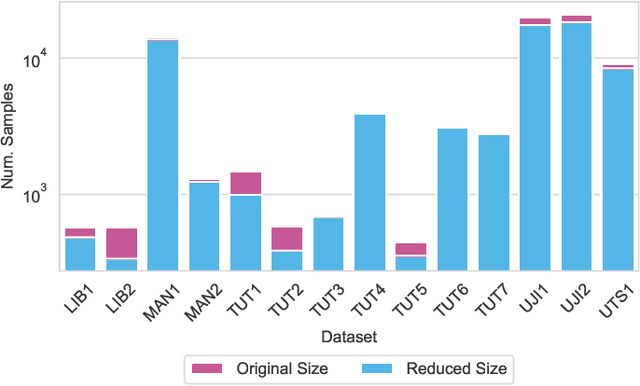

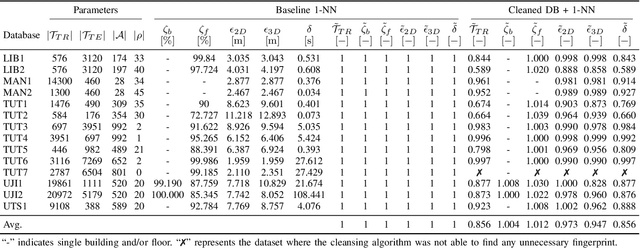
Wearable and IoT devices requiring positioning and localisation services grow in number exponentially every year. This rapid growth also produces millions of data entries that need to be pre-processed prior to being used in any indoor positioning system to ensure the data quality and provide a high Quality of Service (QoS) to the end-user. In this paper, we offer a novel and straightforward data cleansing algorithm for WLAN fingerprinting radio maps. This algorithm is based on the correlation among fingerprints using the Received Signal Strength (RSS) values and the Access Points (APs)'s identifier. We use those to compute the correlation among all samples in the dataset and remove fingerprints with low level of correlation from the dataset. We evaluated the proposed method on 14 independent publicly-available datasets. As a result, an average of 14% of fingerprints were removed from the datasets. The 2D positioning error was reduced by 2.7% and 3D positioning error by 5.3% with a slight increase in the floor hit rate by 1.2% on average. Consequently, the average speed of position prediction was also increased by 14%.
Towards Accelerated Localization Performance Across Indoor Positioning Datasets
Apr 22, 2022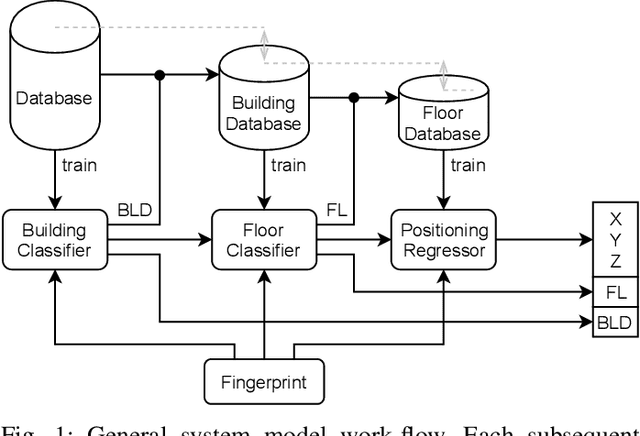
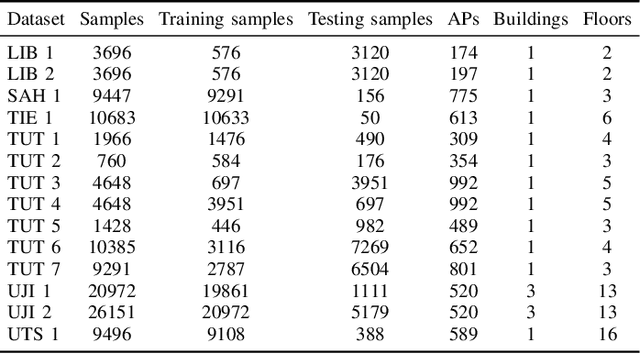
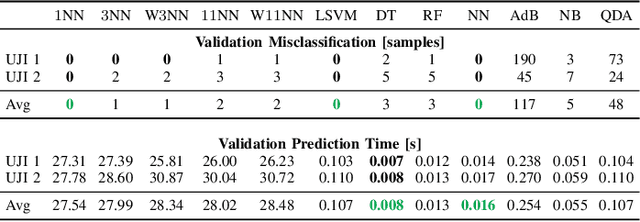
The localization speed and accuracy in the indoor scenario can greatly impact the Quality of Experience of the user. While many individual machine learning models can achieve comparable positioning performance, their prediction mechanisms offer different complexity to the system. In this work, we propose a fingerprinting positioning method for multi-building and multi-floor deployments, composed of a cascade of three models for building classification, floor classification, and 2D localization regression. We conduct an exhaustive search for the optimally performing one in each step of the cascade while validating on 14 different openly available datasets. As a result, we bring forward the best-performing combination of models in terms of overall positioning accuracy and processing speed and evaluate on independent sets of samples. We reduce the mean prediction time by 71% while achieving comparable positioning performance across all considered datasets. Moreover, in case of voluminous training dataset, the prediction time is reduced down to 1% of the benchmark's.
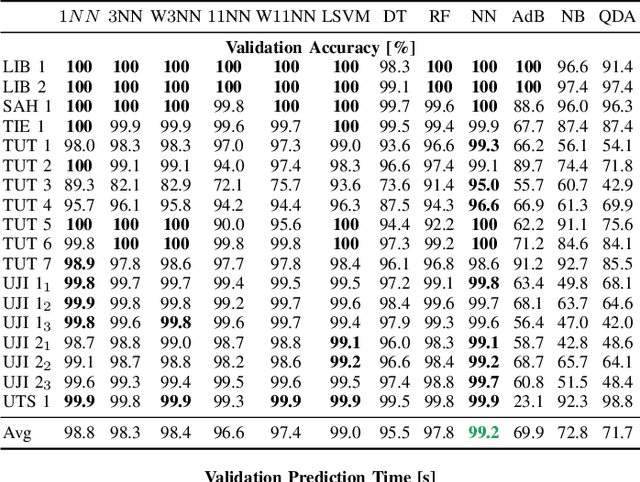
Lightweight Hybrid CNN-ELM Model for Multi-building and Multi-floor Classification
Apr 21, 2022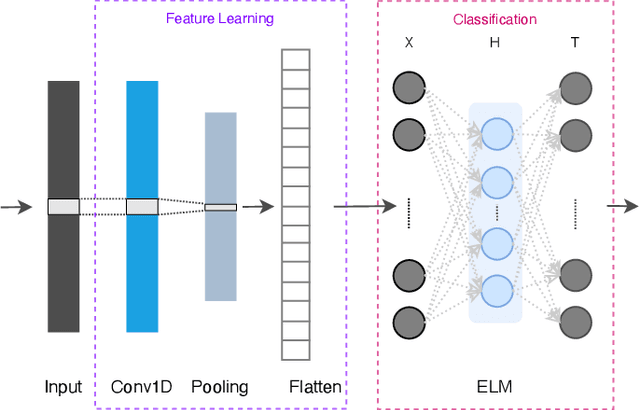
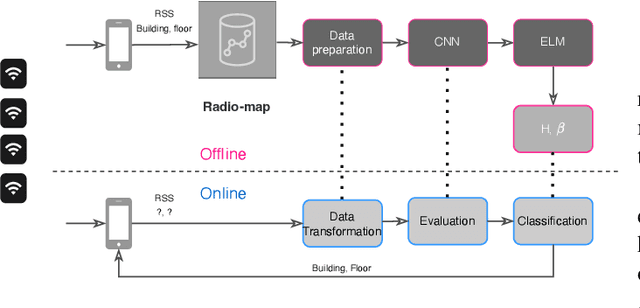


Machine learning models have become an essential tool in current indoor positioning solutions, given their high capabilities to extract meaningful information from the environment. Convolutional neural networks (CNNs) are one of the most used neural networks (NNs) due to that they are capable of learning complex patterns from the input data. Another model used in indoor positioning solutions is the Extreme Learning Machine (ELM), which provides an acceptable generalization performance as well as a fast speed of learning. In this paper, we offer a lightweight combination of CNN and ELM, which provides a quick and accurate classification of building and floor, suitable for power and resource-constrained devices. As a result, the proposed model is 58\% faster than the benchmark, with a slight improvement in the classification accuracy (by less than 1\%
Towards Ubiquitous Indoor Positioning: Comparing Systems across Heterogeneous Datasets
Sep 20, 2021



The evaluation of Indoor Positioning Systems (IPS) mostly relies on local deployments in the researchers' or partners' facilities. The complexity of preparing comprehensive experiments, collecting data, and considering multiple scenarios usually limits the evaluation area and, therefore, the assessment of the proposed systems. The requirements and features of controlled experiments cannot be generalized since the use of the same sensors or anchors density cannot be guaranteed. The dawn of datasets is pushing IPS evaluation to a similar level as machine-learning models, where new proposals are evaluated over many heterogeneous datasets. This paper proposes a way to evaluate IPSs in multiple scenarios, that is validated with three use cases. The results prove that the proposed aggregation of the evaluation metric values is a useful tool for high-level comparison of IPSs.