 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeadline-Aware, Energy-Efficient Control of Domestic Immersion Hot Water Heaters
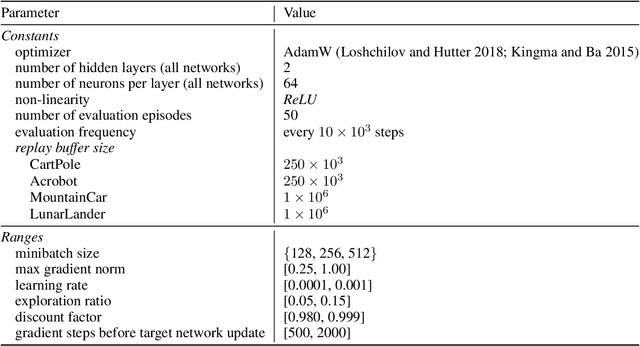
Jan 26, 2026Typical domestic immersion water heater systems are often operated continuously during winter, heating quickly rather than efficiently and ignoring predictable demand windows and ambient losses. We study deadline-aware control, where the aim is to reach a target temperature at a specified time while minimising energy consumption. We introduce an efficient Gymnasium environment that models an immersion hot water heater with first-order thermal losses and discrete on and off actions of 0 W and 6000 W applied every 120 seconds. Methods include a time-optimal bang-bang baseline, a zero-shot Monte Carlo Tree Search planner, and a Proximal Policy Optimisation policy. We report total energy consumption in watt-hours under identical physical dynamics. Across sweeps of initial temperature from 10 to 30 degrees Celsius, deadline from 30 to 90 steps, and target temperature from 40 to 80 degrees Celsius, PPO achieves the most energy-efficient performance at a 60-step horizon of 2 hours, using 3.23 kilowatt-hours, compared to 4.37 to 10.45 kilowatt-hours for bang-bang control and 4.18 to 6.46 kilowatt-hours for MCTS. This corresponds to energy savings of 26 percent at 30 steps and 69 percent at 90 steps. In a representative trajectory with a 50 kg water mass, 20 degrees Celsius ambient temperature, and a 60 degrees Celsius target, PPO consumes 54 percent less energy than bang-bang control and 33 percent less than MCTS. These results show that learned deadline-aware control reduces energy consumption under identical physical assumptions, while planners provide partial savings without training and learned policies offer near-zero inference cost once trained.
Higher-Order Action Regularization in Deep Reinforcement Learning: From Continuous Control to Building Energy Management
Jan 05, 2026Deep reinforcement learning agents often exhibit erratic, high-frequency control behaviors that hinder real-world deployment due to excessive energy consumption and mechanical wear. We systematically investigate action smoothness regularization through higher-order derivative penalties, progressing from theoretical understanding in continuous control benchmarks to practical validation in building energy management. Our comprehensive evaluation across four continuous control environments demonstrates that third-order derivative penalties (jerk minimization) consistently achieve superior smoothness while maintaining competitive performance. We extend these findings to HVAC control systems where smooth policies reduce equipment switching by 60%, translating to significant operational benefits. Our work establishes higher-order action regularization as an effective bridge between RL optimization and operational constraints in energy-critical applications.
Learning from Less: SINDy Surrogates in RL
Apr 25, 2025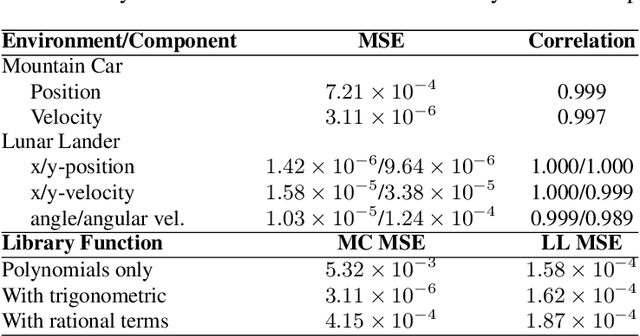
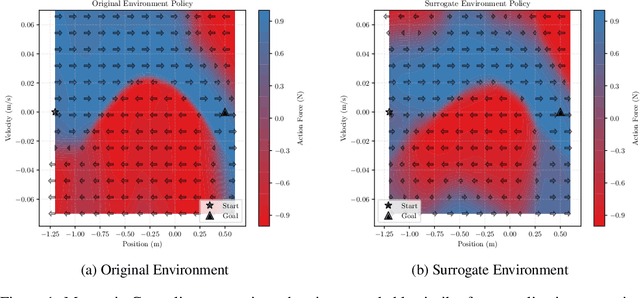
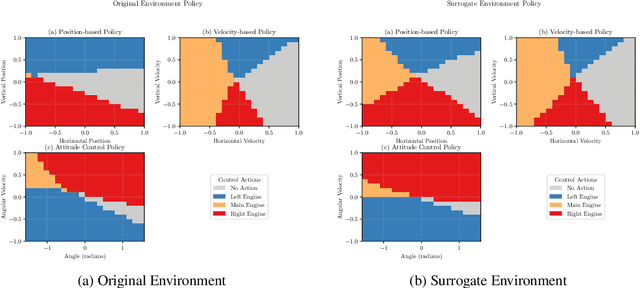
This paper introduces an approach for developing surrogate environments in reinforcement learning (RL) using the Sparse Identification of Nonlinear Dynamics (SINDy) algorithm. We demonstrate the effectiveness of our approach through extensive experiments in OpenAI Gym environments, particularly Mountain Car and Lunar Lander. Our results show that SINDy-based surrogate models can accurately capture the underlying dynamics of these environments while reducing computational costs by 20-35%. With only 75 interactions for Mountain Car and 1000 for Lunar Lander, we achieve state-wise correlations exceeding 0.997, with mean squared errors as low as 3.11e-06 for Mountain Car velocity and 1.42e-06 for LunarLander position. RL agents trained in these surrogate environments require fewer total steps (65,075 vs. 100,000 for Mountain Car and 801,000 vs. 1,000,000 for Lunar Lander) while achieving comparable performance to those trained in the original environments, exhibiting similar convergence patterns and final performance metrics. This work contributes to the field of model-based RL by providing an efficient method for generating accurate, interpretable surrogate environments.
PyFlyt -- UAV Simulation Environments for Reinforcement Learning Research
Apr 03, 2023
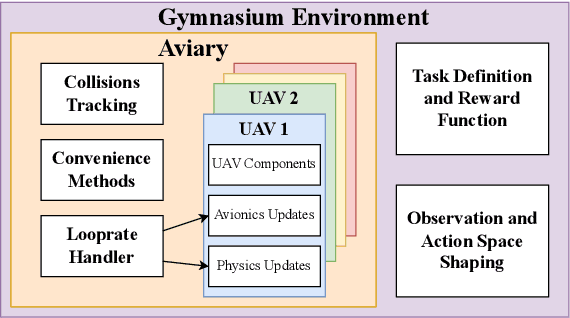
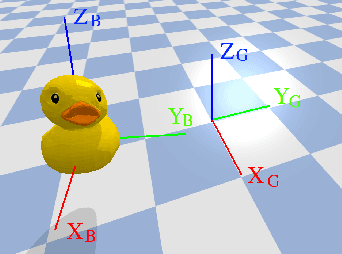
Unmanned aerial vehicles (UAVs) have numerous applications, but their efficient and optimal flight can be a challenge. Reinforcement Learning (RL) has emerged as a promising approach to address this challenge, yet there is no standardized library for testing and benchmarking RL algorithms on UAVs. In this paper, we introduce PyFlyt, a platform built on the Bullet physics engine with native Gymnasium API support. PyFlyt provides modular implementations of simple components, such as motors and lifting surfaces, allowing for the implementation of UAVs of arbitrary configurations. Additionally, PyFlyt includes various task definitions and multiple reward function settings for each vehicle type. We demonstrate the effectiveness of PyFlyt by training various RL agents for two UAV models: quadrotor and fixed-wing. Our findings highlight the effectiveness of RL in UAV control and planning, and further show that it is possible to train agents in sparse reward settings for UAVs. PyFlyt fills a gap in existing literature by providing a flexible and standardised platform for testing RL algorithms on UAVs. We believe that this will inspire more standardised research in this direction.
Some Supervision Required: Incorporating Oracle Policies in Reinforcement Learning via Epistemic Uncertainty Metrics
Aug 22, 2022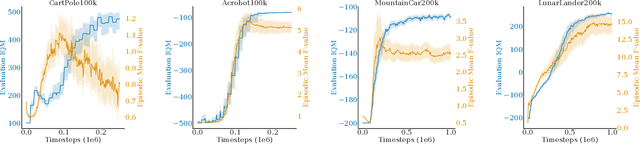


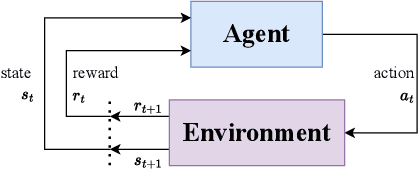
An inherent problem in reinforcement learning is coping with policies that are uncertain about what action to take (or the value of a state). Model uncertainty, more formally known as epistemic uncertainty, refers to the expected prediction error of a model beyond the sampling noise. In this paper, we propose a metric for epistemic uncertainty estimation in Q-value functions, which we term pathwise epistemic uncertainty. We further develop a method to compute its approximate upper bound, which we call F -value. We experimentally apply the latter to Deep Q-Networks (DQN) and show that uncertainty estimation in reinforcement learning serves as a useful indication of learning progress. We then propose a new approach to improving sample efficiency in actor-critic algorithms by learning from an existing (previously learned or hard-coded) oracle policy while uncertainty is high, aiming to avoid unproductive random actions during training. We term this Critic Confidence Guided Exploration (CCGE). We implement CCGE on Soft Actor-Critic (SAC) using our F-value metric, which we apply to a handful of popular Gym environments and show that it achieves better sample efficiency and total episodic reward than vanilla SAC in limited contexts.
Differential radial basis function network for sequence modelling
Oct 13, 2020
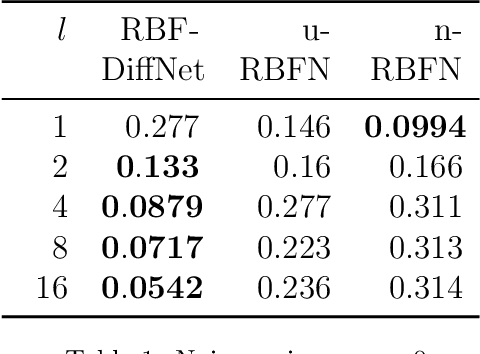


We propose a differential radial basis function (RBF) network termed RBF-DiffNet -- whose hidden layer blocks are partial differential equations (PDEs) linear in terms of the RBF -- to make the baseline RBF network robust to noise in sequential data. Assuming that the sequential data derives from the discretisation of the solution to an underlying PDE, the differential RBF network learns constant linear coefficients of the PDE, consequently regularising the RBF network by following modified backward-Euler updates. We experimentally validate the differential RBF network on the logistic map chaotic timeseries as well as on 30 real-world timeseries provided by Walmart in the M5 forecasting competition. The proposed model is compared with the normalised and unnormalised RBF networks, ARIMA, and ensembles of multilayer perceptrons (MLPs) and recurrent networks with long short-term memory (LSTM) blocks. From the experimental results, RBF-DiffNet consistently shows a marked reduction over the baseline RBF network in terms of the prediction error (e.g., 26% reduction in the root mean squared scaled error on the M5 dataset); RBF-DiffNet also shows a comparable performance to the LSTM ensemble at less than one-sixteenth the LSTM computational time. Our proposed network consequently enables more accurate predictions -- in the presence of observational noise -- in sequence modelling tasks such as timeseries forecasting that leverage the model interpretability, fast training, and function approximation properties of the RBF network.
Reinforcement Learning-based Thermal Comfort Control for Vehicle Cabins
Sep 05, 2017
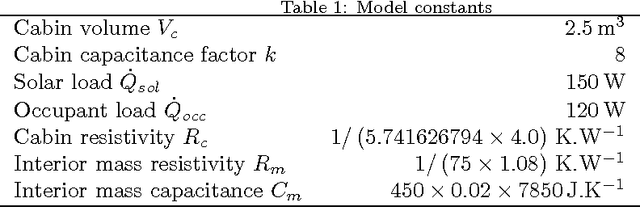


Vehicle climate control systems aim to keep passengers thermally comfortable. However, current systems control temperature rather than thermal comfort and tend to be energy hungry, which is of particular concern when considering electric vehicles. This paper poses energy-efficient vehicle comfort control as a Markov Decision Process, which is then solved numerically using Sarsa({\lambda}) and an empirically validated, single-zone, 1D thermal model of the cabin. The resulting controller was tested in simulation using 200 randomly selected scenarios and found to exceed the performance of bang-bang, proportional, simple fuzzy logic, and commercial controllers with 23%, 43%, 40%, 56% increase, respectively. Compared to the next best performing controller, energy consumption is reduced by 13% while the proportion of time spent thermally comfortable is increased by 23%. These results indicate that this is a viable approach that promises to translate into substantial comfort and energy improvements in the car.
K-Means Clustering using Tabu Search with Quantized Means
Mar 24, 2017


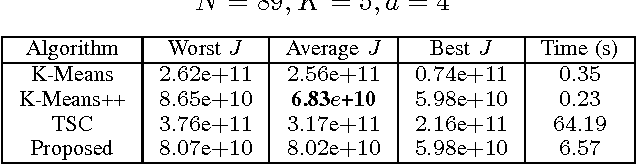
The Tabu Search (TS) metaheuristic has been proposed for K-Means clustering as an alternative to Lloyd's algorithm, which for all its ease of implementation and fast runtime, has the major drawback of being trapped at local optima. While the TS approach can yield superior performance, it involves a high computational complexity. Moreover, the difficulty in parameter selection in the existing TS approach does not make it any more attractive. This paper presents an alternative, low-complexity formulation of the TS optimization procedure for K-Means clustering. This approach does not require many parameter settings. We initially constrain the centers to points in the dataset. We then aim at evolving these centers using a unique neighborhood structure that makes use of gradient information of the objective function. This results in an efficient exploration of the search space, after which the means are refined. The proposed scheme is implemented in MATLAB and tested on four real-world datasets, and it achieves a significant improvement over the existing TS approach in terms of the intra cluster sum of squares and computational time.
Linear classifier design under heteroscedasticity in Linear Discriminant Analysis
Mar 24, 2017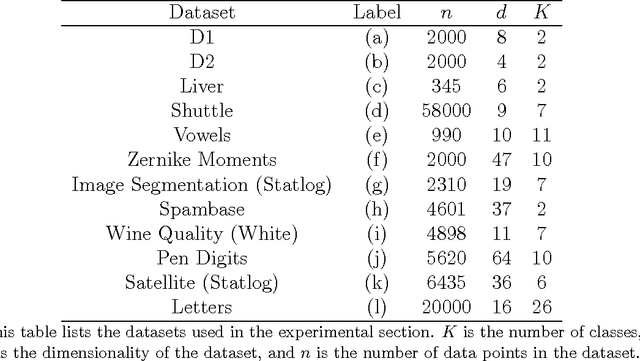



Under normality and homoscedasticity assumptions, Linear Discriminant Analysis (LDA) is known to be optimal in terms of minimising the Bayes error for binary classification. In the heteroscedastic case, LDA is not guaranteed to minimise this error. Assuming heteroscedasticity, we derive a linear classifier, the Gaussian Linear Discriminant (GLD), that directly minimises the Bayes error for binary classification. In addition, we also propose a local neighbourhood search (LNS) algorithm to obtain a more robust classifier if the data is known to have a non-normal distribution. We evaluate the proposed classifiers on two artificial and ten real-world datasets that cut across a wide range of application areas including handwriting recognition, medical diagnosis and remote sensing, and then compare our algorithm against existing LDA approaches and other linear classifiers. The GLD is shown to outperform the original LDA procedure in terms of the classification accuracy under heteroscedasticity. While it compares favourably with other existing heteroscedastic LDA approaches, the GLD requires as much as 60 times lower training time on some datasets. Our comparison with the support vector machine (SVM) also shows that, the GLD, together with the LNS, requires as much as 150 times lower training time to achieve an equivalent classification accuracy on some of the datasets. Thus, our algorithms can provide a cheap and reliable option for classification in a lot of expert systems.