 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferential radial basis function network for sequence modelling
Oct 13, 2020
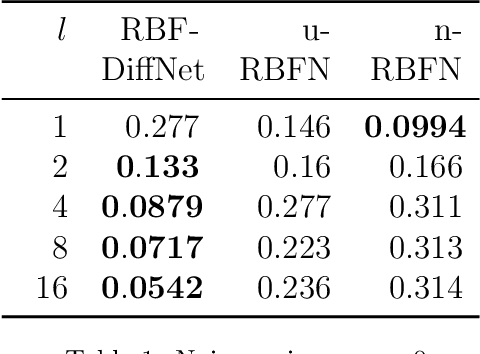


We propose a differential radial basis function (RBF) network termed RBF-DiffNet -- whose hidden layer blocks are partial differential equations (PDEs) linear in terms of the RBF -- to make the baseline RBF network robust to noise in sequential data. Assuming that the sequential data derives from the discretisation of the solution to an underlying PDE, the differential RBF network learns constant linear coefficients of the PDE, consequently regularising the RBF network by following modified backward-Euler updates. We experimentally validate the differential RBF network on the logistic map chaotic timeseries as well as on 30 real-world timeseries provided by Walmart in the M5 forecasting competition. The proposed model is compared with the normalised and unnormalised RBF networks, ARIMA, and ensembles of multilayer perceptrons (MLPs) and recurrent networks with long short-term memory (LSTM) blocks. From the experimental results, RBF-DiffNet consistently shows a marked reduction over the baseline RBF network in terms of the prediction error (e.g., 26% reduction in the root mean squared scaled error on the M5 dataset); RBF-DiffNet also shows a comparable performance to the LSTM ensemble at less than one-sixteenth the LSTM computational time. Our proposed network consequently enables more accurate predictions -- in the presence of observational noise -- in sequence modelling tasks such as timeseries forecasting that leverage the model interpretability, fast training, and function approximation properties of the RBF network.
Reinforcement Learning-based Thermal Comfort Control for Vehicle Cabins
Sep 05, 2017
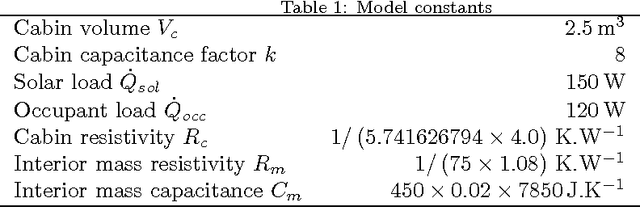


Vehicle climate control systems aim to keep passengers thermally comfortable. However, current systems control temperature rather than thermal comfort and tend to be energy hungry, which is of particular concern when considering electric vehicles. This paper poses energy-efficient vehicle comfort control as a Markov Decision Process, which is then solved numerically using Sarsa({\lambda}) and an empirically validated, single-zone, 1D thermal model of the cabin. The resulting controller was tested in simulation using 200 randomly selected scenarios and found to exceed the performance of bang-bang, proportional, simple fuzzy logic, and commercial controllers with 23%, 43%, 40%, 56% increase, respectively. Compared to the next best performing controller, energy consumption is reduced by 13% while the proportion of time spent thermally comfortable is increased by 23%. These results indicate that this is a viable approach that promises to translate into substantial comfort and energy improvements in the car.
Linear classifier design under heteroscedasticity in Linear Discriminant Analysis
Mar 24, 2017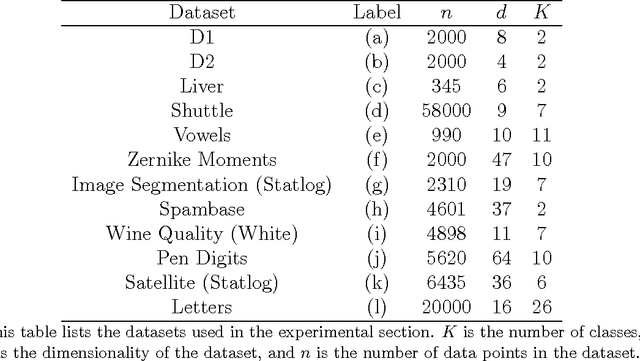



Under normality and homoscedasticity assumptions, Linear Discriminant Analysis (LDA) is known to be optimal in terms of minimising the Bayes error for binary classification. In the heteroscedastic case, LDA is not guaranteed to minimise this error. Assuming heteroscedasticity, we derive a linear classifier, the Gaussian Linear Discriminant (GLD), that directly minimises the Bayes error for binary classification. In addition, we also propose a local neighbourhood search (LNS) algorithm to obtain a more robust classifier if the data is known to have a non-normal distribution. We evaluate the proposed classifiers on two artificial and ten real-world datasets that cut across a wide range of application areas including handwriting recognition, medical diagnosis and remote sensing, and then compare our algorithm against existing LDA approaches and other linear classifiers. The GLD is shown to outperform the original LDA procedure in terms of the classification accuracy under heteroscedasticity. While it compares favourably with other existing heteroscedastic LDA approaches, the GLD requires as much as 60 times lower training time on some datasets. Our comparison with the support vector machine (SVM) also shows that, the GLD, together with the LNS, requires as much as 150 times lower training time to achieve an equivalent classification accuracy on some of the datasets. Thus, our algorithms can provide a cheap and reliable option for classification in a lot of expert systems.