 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePyFlyt -- UAV Simulation Environments for Reinforcement Learning Research
Apr 03, 2023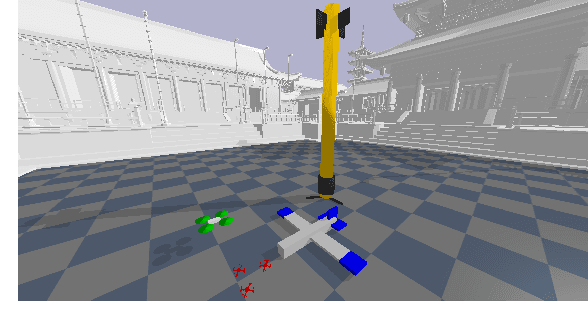
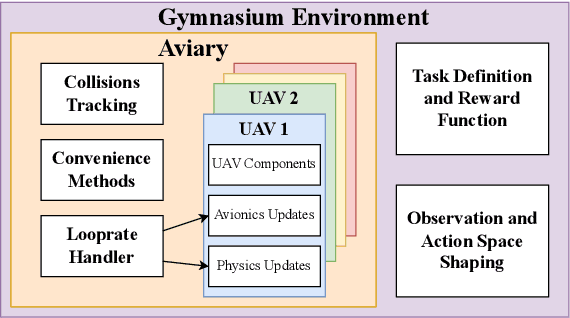
Unmanned aerial vehicles (UAVs) have numerous applications, but their efficient and optimal flight can be a challenge. Reinforcement Learning (RL) has emerged as a promising approach to address this challenge, yet there is no standardized library for testing and benchmarking RL algorithms on UAVs. In this paper, we introduce PyFlyt, a platform built on the Bullet physics engine with native Gymnasium API support. PyFlyt provides modular implementations of simple components, such as motors and lifting surfaces, allowing for the implementation of UAVs of arbitrary configurations. Additionally, PyFlyt includes various task definitions and multiple reward function settings for each vehicle type. We demonstrate the effectiveness of PyFlyt by training various RL agents for two UAV models: quadrotor and fixed-wing. Our findings highlight the effectiveness of RL in UAV control and planning, and further show that it is possible to train agents in sparse reward settings for UAVs. PyFlyt fills a gap in existing literature by providing a flexible and standardised platform for testing RL algorithms on UAVs. We believe that this will inspire more standardised research in this direction.
BOBBY2: Buffer Based Robust High-Speed Object Tracking
Oct 18, 2019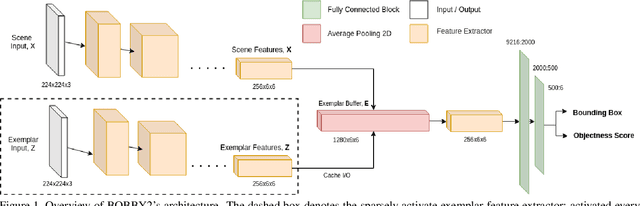
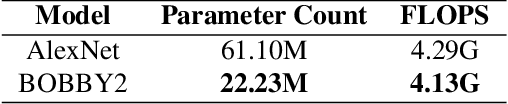


In this work, a novel high-speed single object tracker that is robust against non-semantic distractor exemplars is introduced; dubbed BOBBY2. It incorporates a novel exemplar buffer module that sparsely caches the target's appearance across time, enabling it to adapt to potential target deformation. As for training, an augmented ImageNet-VID dataset was used in conjunction with the one cycle policy, enabling it to reach convergence with less than 2 epoch worth of data. For validation, the model was benchmarked on the GOT-10k dataset and on an additional small, albeit challenging custom UAV dataset collected with the TU-3 UAV. We demonstrate that the exemplar buffer is capable of providing redundancies in case of unintended target drifts, a desirable trait in any middle to long term tracking. Even when the buffer is predominantly filled with distractors instead of valid exemplars, BOBBY2 is capable of maintaining a near-optimal level of accuracy. BOBBY2 manages to achieve a very competitive result on the GOT-10k dataset and to a lesser degree on the challenging custom TU-3 dataset, without fine-tuning, demonstrating its generalizability. In terms of speed, BOBBY2 utilizes a stripped down AlexNet as feature extractor with 63% less parameters than a vanilla AlexNet, thus being able to run at a competitive 85 FPS.