 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequential Testing for Descriptor-Agnostic LiDAR Loop Closure in Repetitive Environments
Dec 10, 2025We propose a descriptor-agnostic, multi-frame loop closure verification method that formulates LiDAR loop closure as a truncated Sequential Probability Ratio Test (SPRT). Instead of deciding from a single descriptor comparison or using fixed thresholds with late-stage Iterative Closest Point (ICP) vetting, the verifier accumulates a short temporal stream of descriptor similarities between a query and each candidate. It then issues an accept/reject decision adaptively once sufficient multi-frame evidence has been observed, according to user-specified Type-I/II error design targets. This precision-first policy is designed to suppress false positives in structurally repetitive indoor environments. We evaluate the verifier on a five-sequence library dataset, using a fixed retrieval front-end with several representative LiDAR global descriptors. Performance is assessed via segment-level K-hit precision-recall and absolute trajectory error (ATE) and relative pose error (RPE) after pose graph optimization. Across descriptors, the sequential verifier consistently improves precision and reduces the impact of aliased loops compared with single-frame and heuristic multi-frame baselines. Our implementation and dataset will be released at: https://github.com/wanderingcar/snu_library_dataset.
In-situ and Non-contact Etch Depth Prediction in Plasma Etching via Machine Learning (ANN & BNN) and Digital Image Colorimetry
May 03, 2025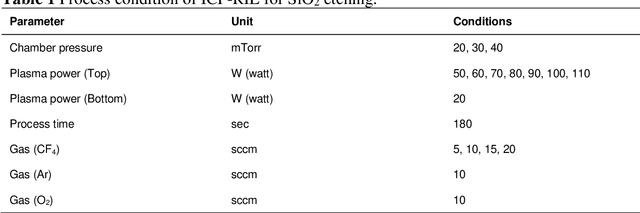
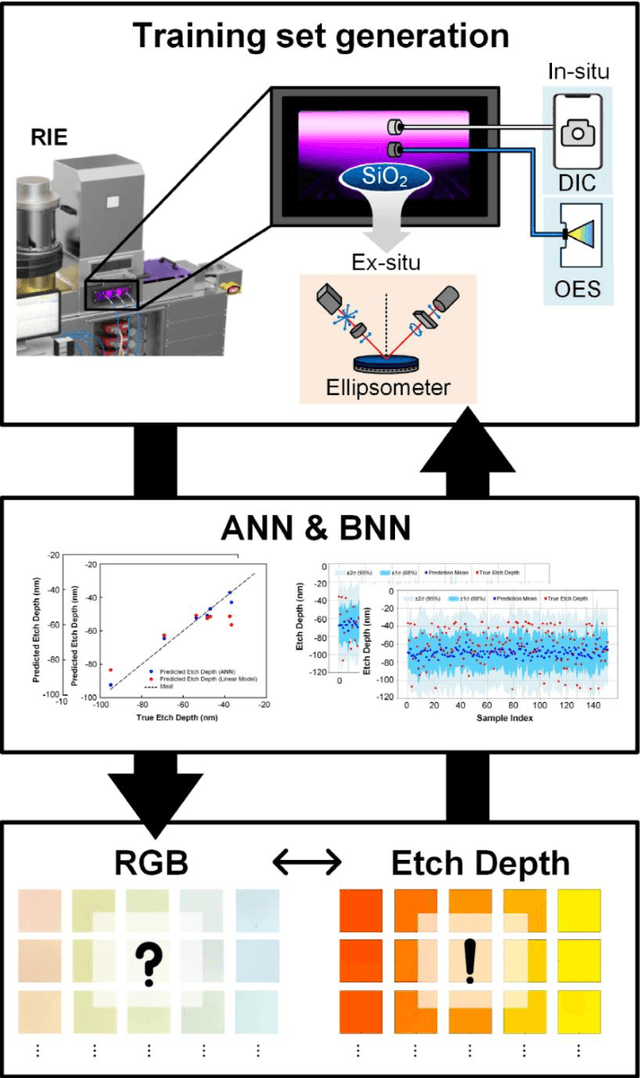
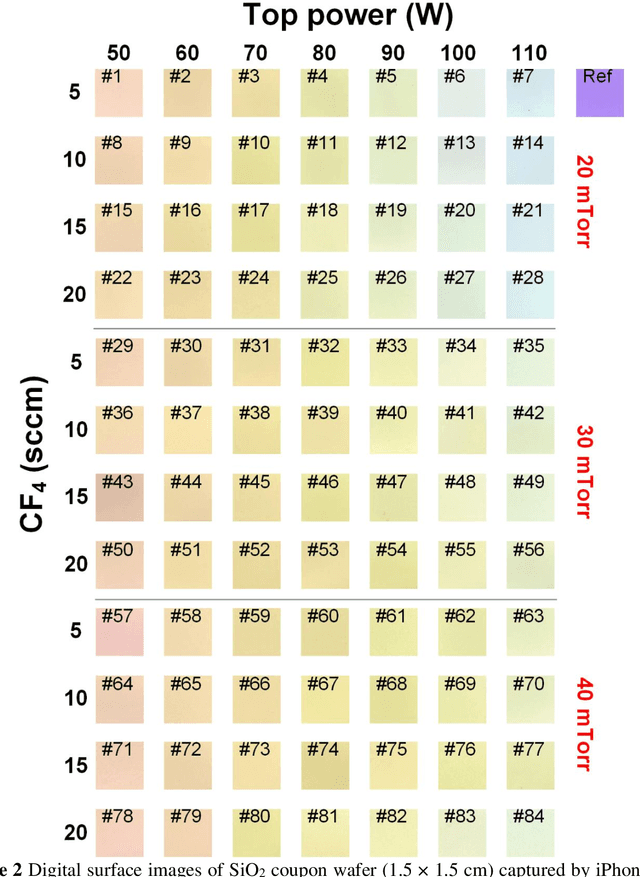
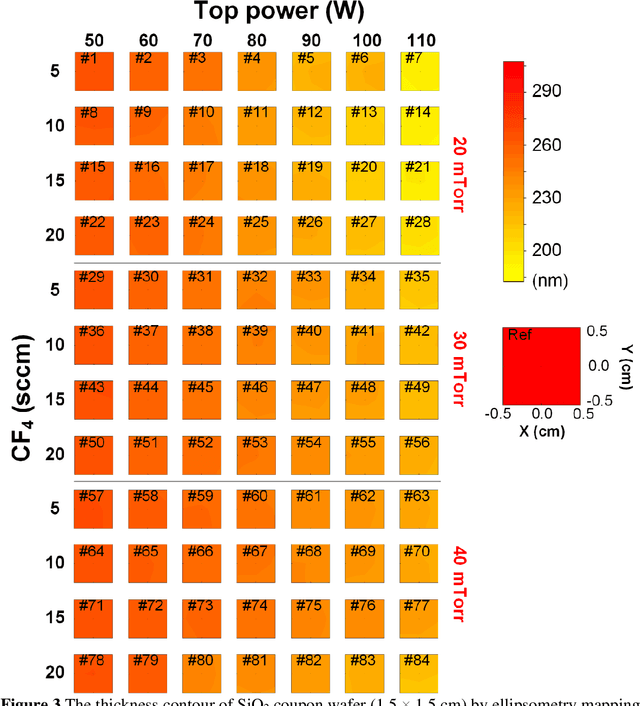
Precise monitoring of etch depth and the thickness of insulating materials, such as Silicon dioxide and silicon nitride, is critical to ensuring device performance and yield in semiconductor manufacturing. While conventional ex-situ analysis methods are accurate, they are constrained by time delays and contamination risks. To address these limitations, this study proposes a non-contact, in-situ etch depth prediction framework based on machine learning (ML) techniques. Two scenarios are explored. In the first scenario, an artificial neural network (ANN) is trained to predict average etch depth from process parameters, achieving a significantly lower mean squared error (MSE) compared to a linear baseline model. The approach is then extended to incorporate variability from repeated measurements using a Bayesian Neural Network (BNN) to capture both aleatoric and epistemic uncertainty. Coverage analysis confirms the BNN's capability to provide reliable uncertainty estimates. In the second scenario, we demonstrate the feasibility of using RGB data from digital image colorimetry (DIC) as input for etch depth prediction, achieving strong performance even in the absence of explicit process parameters. These results suggest that the integration of DIC and ML offers a viable, cost-effective alternative for real-time, in-situ, and non-invasive monitoring in plasma etching processes, contributing to enhanced process stability, and manufacturing efficiency.
DAKD: Data Augmentation and Knowledge Distillation using Diffusion Models for SAR Oil Spill Segmentation
Dec 11, 2024



Oil spills in the ocean pose severe environmental risks, making early detection essential. Synthetic aperture radar (SAR) based oil spill segmentation offers robust monitoring under various conditions but faces challenges due to the limited labeled data and inherent speckle noise in SAR imagery. To address these issues, we propose (i) a diffusion-based Data Augmentation and Knowledge Distillation (DAKD) pipeline and (ii) a novel SAR oil spill segmentation network, called SAROSS-Net. In our DAKD pipeline, we present a diffusion-based SAR-JointNet that learns to generate realistic SAR images and their labels for segmentation, by effectively modeling joint distribution with balancing two modalities. The DAKD pipeline augments the training dataset and distills knowledge from SAR-JointNet by utilizing generated soft labels (pixel-wise probability maps) to supervise our SAROSS-Net. The SAROSS-Net is designed to selectively transfer high-frequency features from noisy SAR images, by employing novel Context-Aware Feature Transfer blocks along skip connections. We demonstrate our SAR-JointNet can generate realistic SAR images and well-aligned segmentation labels, providing the augmented data to train SAROSS-Net with enhanced generalizability. Our SAROSS-Net trained with the DAKD pipeline significantly outperforms existing SAR oil spill segmentation methods with large margins.
Inertial Guided Uncertainty Estimation of Feature Correspondence in Visual-Inertial Odometry/SLAM
Nov 07, 2023



Visual odometry and Simultaneous Localization And Mapping (SLAM) has been studied as one of the most important tasks in the areas of computer vision and robotics, to contribute to autonomous navigation and augmented reality systems. In case of feature-based odometry/SLAM, a moving visual sensor observes a set of 3D points from different viewpoints, correspondences between the projected 2D points in each image are usually established by feature tracking and matching. However, since the corresponding point could be erroneous and noisy, reliable uncertainty estimation can improve the accuracy of odometry/SLAM methods. In addition, inertial measurement unit is utilized to aid the visual sensor in terms of Visual-Inertial fusion. In this paper, we propose a method to estimate the uncertainty of feature correspondence using an inertial guidance robust to image degradation caused by motion blur, illumination change and occlusion. Modeling a guidance distribution to sample possible correspondence, we fit the distribution to an energy function based on image error, yielding more robust uncertainty than conventional methods. We also demonstrate the feasibility of our approach by incorporating it into one of recent visual-inertial odometry/SLAM algorithms for public datasets.
Efficient Graduated Non-Convexity for Pose Graph Optimization
Oct 10, 2023



We propose a novel approach to Graduated Non-Convexity (GNC) and demonstrate its efficacy through its application in robust pose graph optimization, a key component in SLAM backends. Traditional GNC methods often rely on heuristic methods for GNC schedule, updating control parameter {\mu} for escalating the non-convexity. In contrast, our approach leverages the properties of convex functions and convex optimization to identify the boundary points beyond which convexity is no longer guaranteed, thereby eliminating redundant optimization steps in existing methodologies and enhancing both speed and robustness. We show that our method outperforms the state-of-the-art method in terms of speed and accuracy when used for robust back-end pose graph optimization via GNC. Our work builds upon and enhances the open-source riSAM framework. Our implementation can be accessed from: https://github.com/SNU-DLLAB/EGNC-PGO
Adaptive Graduated Non-Convexity for Pose Graph Optimization
Aug 22, 2023We present a novel approach to robust pose graph optimization based on Graduated Non-Convexity (GNC). Unlike traditional GNC-based methods, the proposed approach employs an adaptive shape function using B-spline to optimize the shape of the robust kernel. This aims to reduce GNC iterations, boosting computational speed without compromising accuracy. When integrated with the open-source riSAM algorithm, the method demonstrates enhanced efficiency across diverse datasets. Accompanying open-source code aims to encourage further research in this area. https://github.com/SNU-DLLAB/AGNC-PGO
Controllable Missingness from Uncontrollable Missingness: Joint Learning Measurement Policy and Imputation
Apr 08, 2022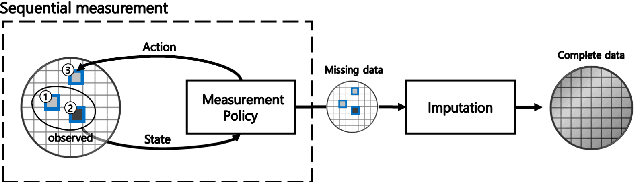
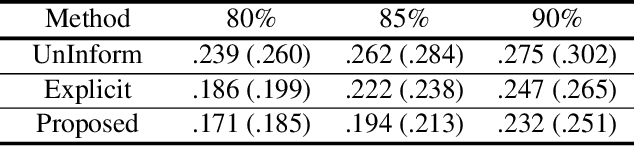
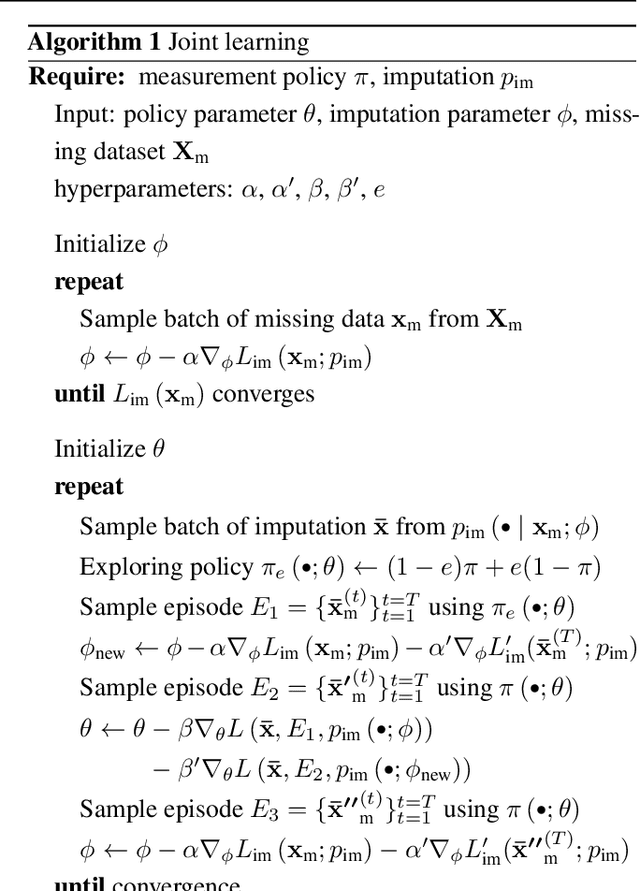
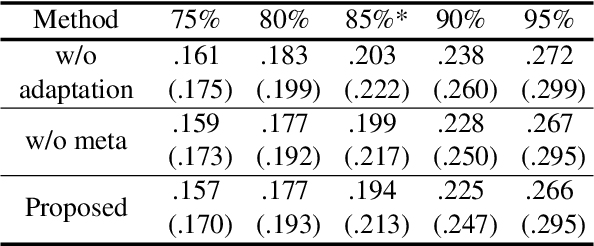
Due to the cost or interference of measurement, we need to control measurement system. Assuming that each variable can be measured sequentially, there exists optimal policy choosing next measurement for the former observations. Though optimal measurement policy is actually dependent on the goal of measurement, we mainly focus on retrieving complete data, so called as imputation. Also, we adapt the imputation method to missingness varying with measurement policy. However, learning measurement policy and imputation requires complete data which is impossible to be observed, unfortunately. To tackle this problem, we propose a data generation method and joint learning algorithm. The main idea is that 1) the data generation method is inherited by imputation method, and 2) the adaptation of imputation encourages measurement policy to learn more than individual learning. We implemented some variations of proposed algorithm for two different datasets and various missing rates. From the experimental results, we demonstrate that our algorithm is generally applicable and outperforms baseline methods.
Spatially and Seamlessly Hierarchical Reinforcement Learning for State Space and Policy space in Autonomous Driving
Nov 10, 2021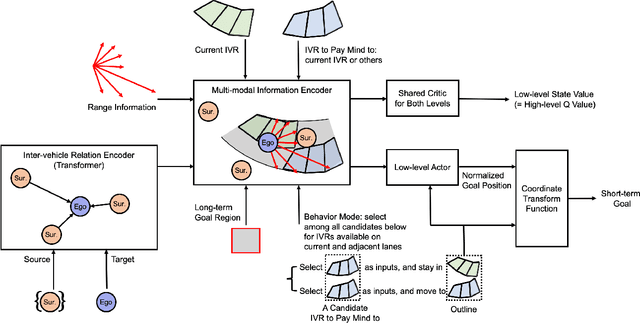
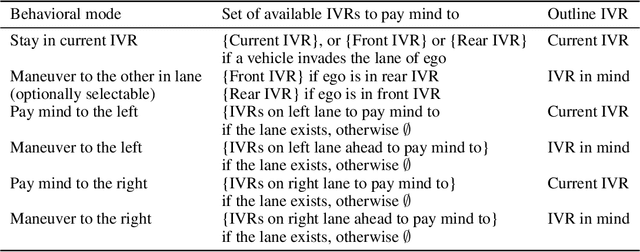
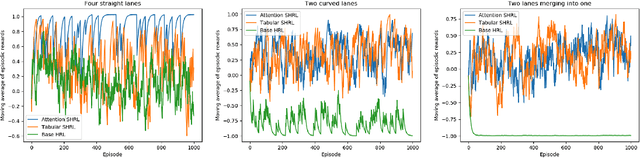
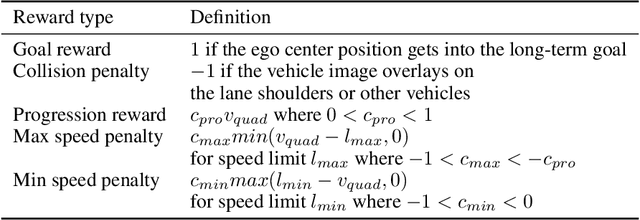
Despite advances in hierarchical reinforcement learning, its applications to path planning in autonomous driving on highways are challenging. One reason is that conventional hierarchical reinforcement learning approaches are not amenable to autonomous driving due to its riskiness: the agent must move avoiding multiple obstacles such as other agents that are highly unpredictable, thus safe regions are small, scattered, and changeable over time. To overcome this challenge, we propose a spatially hierarchical reinforcement learning method for state space and policy space. The high-level policy selects not only behavioral sub-policy but also regions to pay mind to in state space and for outline in policy space. Subsequently, the low-level policy elaborates the short-term goal position of the agent within the outline of the region selected by the high-level command. The network structure and optimization suggested in our method are as concise as those of single-level methods. Experiments on the environment with various shapes of roads showed that our method finds the nearly optimal policies from early episodes, outperforming a baseline hierarchical reinforcement learning method, especially in narrow and complex roads. The resulting trajectories on the roads were similar to those of human strategies on the behavioral planning level.
Simultaneous super-resolution and motion artifact removal in diffusion-weighted MRI using unsupervised deep learning
May 01, 2021

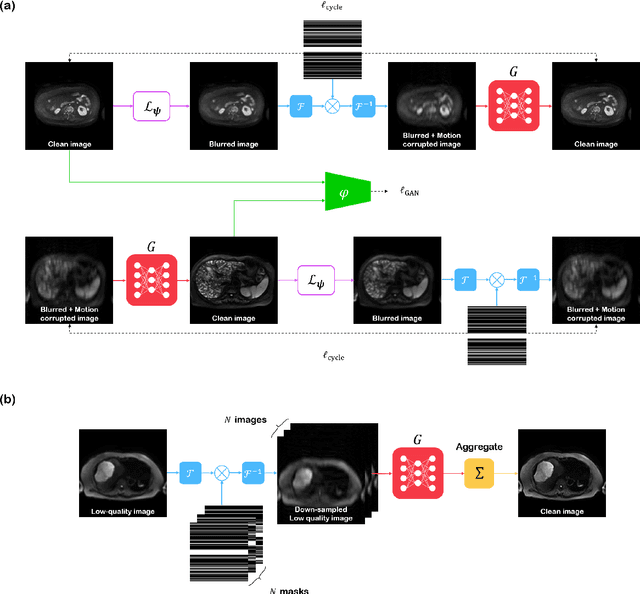
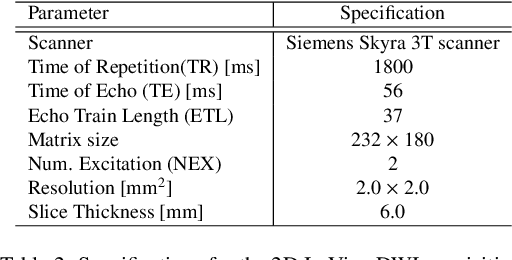
Diffusion-weighted MRI is nowadays performed routinely due to its prognostic ability, yet the quality of the scans are often unsatisfactory which can subsequently hamper the clinical utility. To overcome the limitations, here we propose a fully unsupervised quality enhancement scheme, which boosts the resolution and removes the motion artifact simultaneously. This process is done by first training the network using optimal transport driven cycleGAN with stochastic degradation block which learns to remove aliasing artifacts and enhance the resolution, then using the trained network in the test stage by utilizing bootstrap subsampling and aggregation for motion artifact suppression. We further show that we can control the trade-off between the amount of artifact correction and resolution by controlling the bootstrap subsampling ratio at the inference stage. To the best of our knowledge, the proposed method is the first to tackle super-resolution and motion artifact correction simultaneously in the context of MRI using unsupervised learning. We demonstrate the efficiency of our method by applying it to both quantitative evaluation using simulation study, and to in vivo diffusion-weighted MR scans, which shows that our method is superior to the current state-of-the-art methods. The proposed method is flexible in that it can be applied to various quality enhancement schemes in other types of MR scans, and also directly to the quality enhancement of apparent diffusion coefficient maps.