 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInertial Guided Uncertainty Estimation of Feature Correspondence in Visual-Inertial Odometry/SLAM
Nov 07, 2023



Visual odometry and Simultaneous Localization And Mapping (SLAM) has been studied as one of the most important tasks in the areas of computer vision and robotics, to contribute to autonomous navigation and augmented reality systems. In case of feature-based odometry/SLAM, a moving visual sensor observes a set of 3D points from different viewpoints, correspondences between the projected 2D points in each image are usually established by feature tracking and matching. However, since the corresponding point could be erroneous and noisy, reliable uncertainty estimation can improve the accuracy of odometry/SLAM methods. In addition, inertial measurement unit is utilized to aid the visual sensor in terms of Visual-Inertial fusion. In this paper, we propose a method to estimate the uncertainty of feature correspondence using an inertial guidance robust to image degradation caused by motion blur, illumination change and occlusion. Modeling a guidance distribution to sample possible correspondence, we fit the distribution to an energy function based on image error, yielding more robust uncertainty than conventional methods. We also demonstrate the feasibility of our approach by incorporating it into one of recent visual-inertial odometry/SLAM algorithms for public datasets.
Vision System of Curling Robots: Thrower and Skip
Apr 20, 2022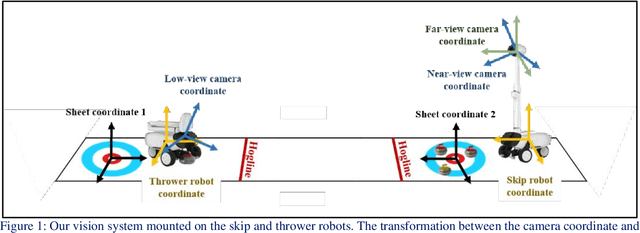
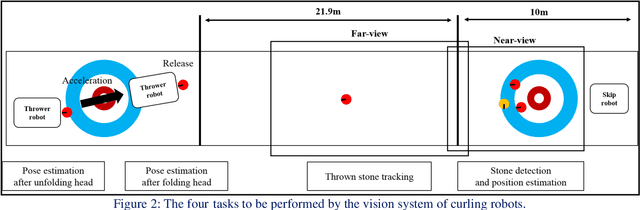
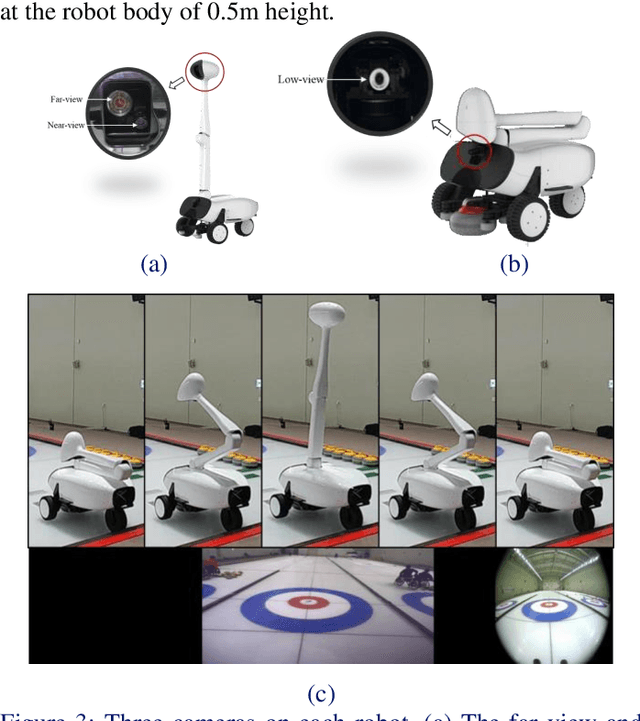
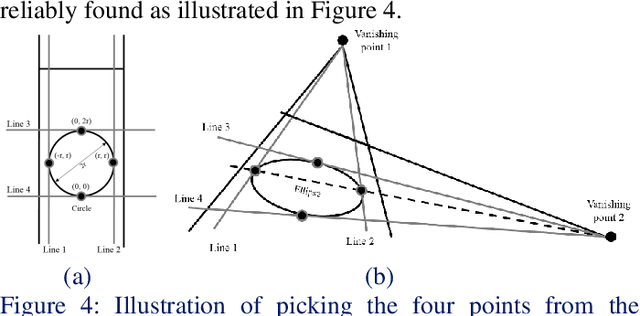
We built a vision system of curling robot which can be expected to play with human curling player. Basically, we built two types of vision systems for thrower and skip robots, respectively. First, the thrower robot drives towards a given point of curling sheet to release a stone. Our vision system in the thrower robot initialize 3DoF pose on two dimensional curling sheet and updates the pose to decide for the decision of stone release. Second, the skip robot stands at the opposite side of the thrower robot and monitors the state of the game to make a strategic decision. Our vision system in the skip robot recognize every stones on the curling sheet precisely. Since the viewpoint is quite perspective, many stones are occluded by each others so it is challenging to estimate the accurate position of stone. Thus, we recognize the ellipses of stone handles outline to find the exact midpoint of the stones using perspective Hough transform. Furthermore, we perform tracking of a thrown stone to produce a trajectory for ice condition analysis. Finally, we implemented our vision systems on two mobile robots and successfully perform a single turn and even careful gameplay. Specifically, our vision system includes three cameras with different viewpoint for their respective purposes.
Controllable Missingness from Uncontrollable Missingness: Joint Learning Measurement Policy and Imputation
Apr 08, 2022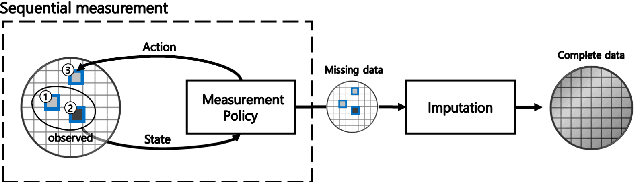
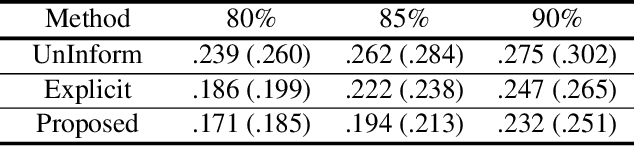
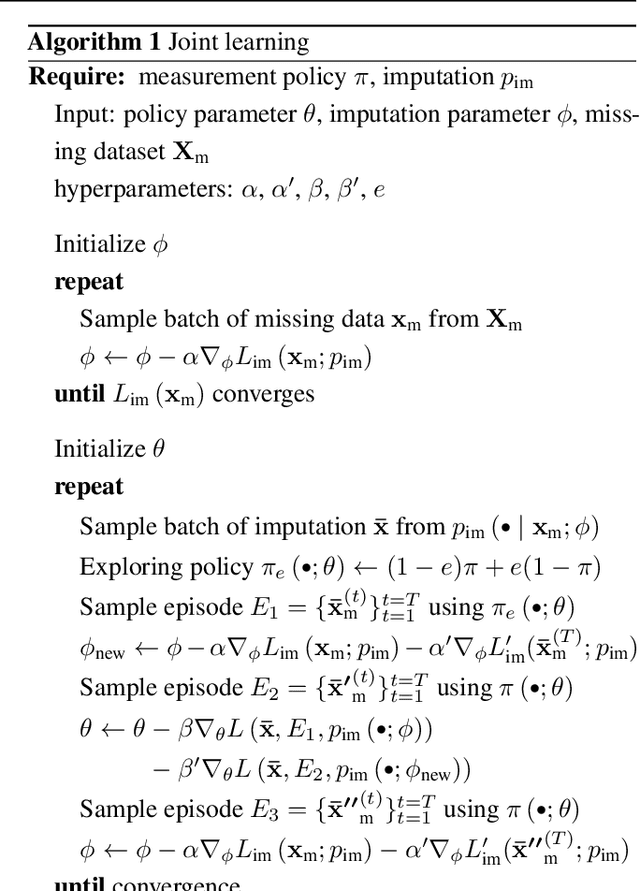
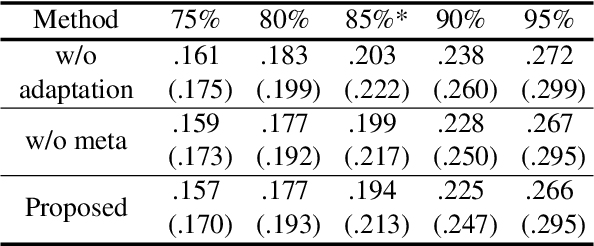
Due to the cost or interference of measurement, we need to control measurement system. Assuming that each variable can be measured sequentially, there exists optimal policy choosing next measurement for the former observations. Though optimal measurement policy is actually dependent on the goal of measurement, we mainly focus on retrieving complete data, so called as imputation. Also, we adapt the imputation method to missingness varying with measurement policy. However, learning measurement policy and imputation requires complete data which is impossible to be observed, unfortunately. To tackle this problem, we propose a data generation method and joint learning algorithm. The main idea is that 1) the data generation method is inherited by imputation method, and 2) the adaptation of imputation encourages measurement policy to learn more than individual learning. We implemented some variations of proposed algorithm for two different datasets and various missing rates. From the experimental results, we demonstrate that our algorithm is generally applicable and outperforms baseline methods.