 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision System of Curling Robots: Thrower and Skip
Apr 20, 2022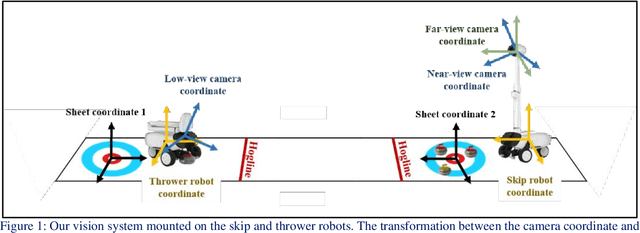
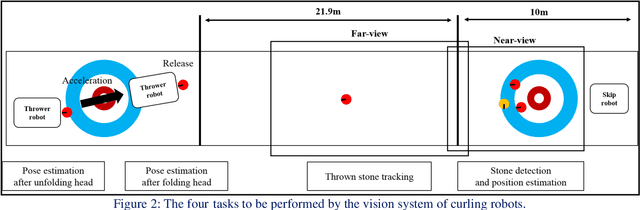
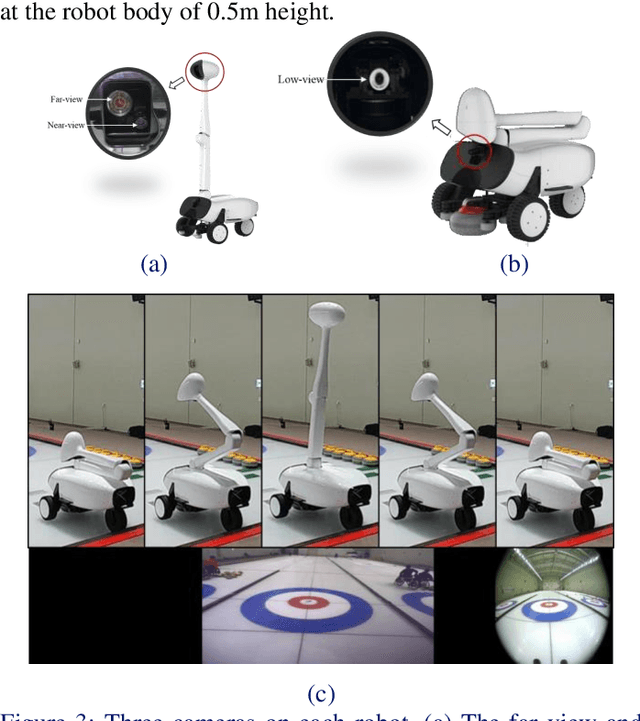
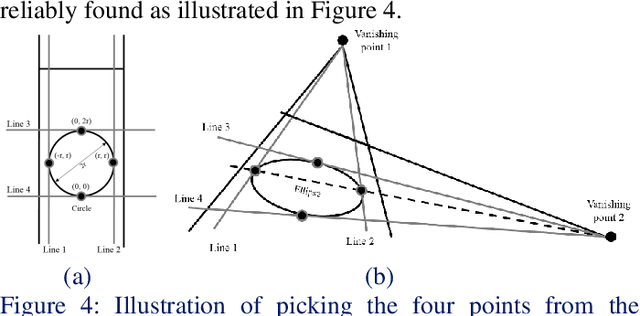
We built a vision system of curling robot which can be expected to play with human curling player. Basically, we built two types of vision systems for thrower and skip robots, respectively. First, the thrower robot drives towards a given point of curling sheet to release a stone. Our vision system in the thrower robot initialize 3DoF pose on two dimensional curling sheet and updates the pose to decide for the decision of stone release. Second, the skip robot stands at the opposite side of the thrower robot and monitors the state of the game to make a strategic decision. Our vision system in the skip robot recognize every stones on the curling sheet precisely. Since the viewpoint is quite perspective, many stones are occluded by each others so it is challenging to estimate the accurate position of stone. Thus, we recognize the ellipses of stone handles outline to find the exact midpoint of the stones using perspective Hough transform. Furthermore, we perform tracking of a thrown stone to produce a trajectory for ice condition analysis. Finally, we implemented our vision systems on two mobile robots and successfully perform a single turn and even careful gameplay. Specifically, our vision system includes three cameras with different viewpoint for their respective purposes.