 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChildBot: Multi-Robot Perception and Interaction with Children
Aug 28, 2020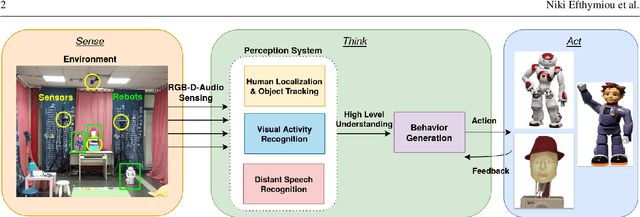

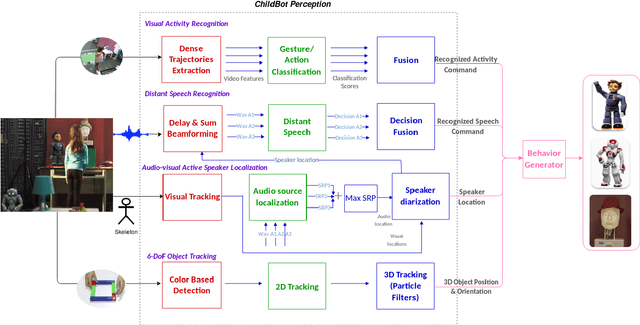
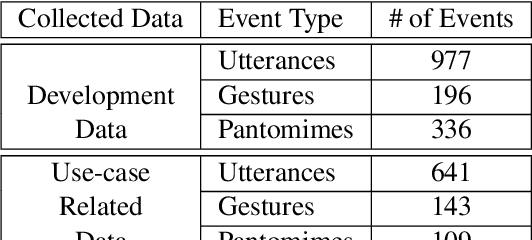
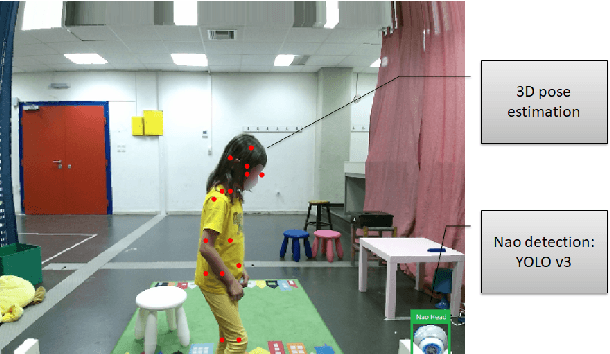
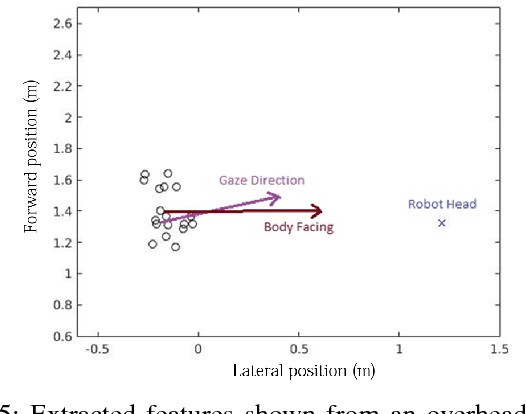
In this paper we present an integrated robotic system capable of participating in and performing a wide range of educational and entertainment tasks, in collaboration with one or more children. The system, called ChildBot, features multimodal perception modules and multiple robotic agents that monitor the interaction environment, and can robustly coordinate complex Child-Robot Interaction use-cases. In order to validate the effectiveness of the system and its integrated modules, we have conducted multiple experiments with a total of 52 children. Our results show improved perception capabilities in comparison to our earlier works that ChildBot was based on. In addition, we have conducted a preliminary user experience study, employing some educational/entertainment tasks, that yields encouraging results regarding the technical validity of our system and initial insights on the user experience with it.
LSTM-based Network for Human Gait Stability Prediction in an Intelligent Robotic Rollator
Mar 05, 2019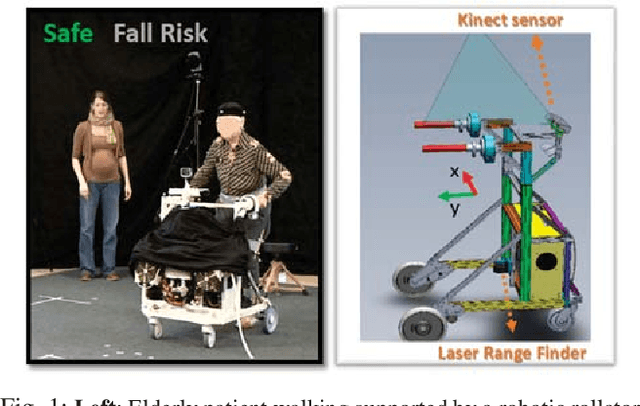
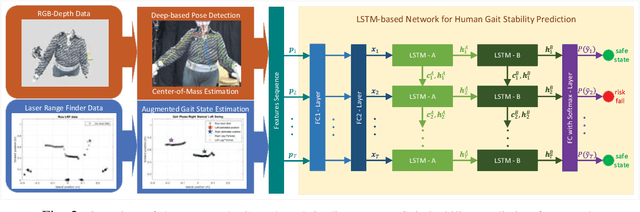
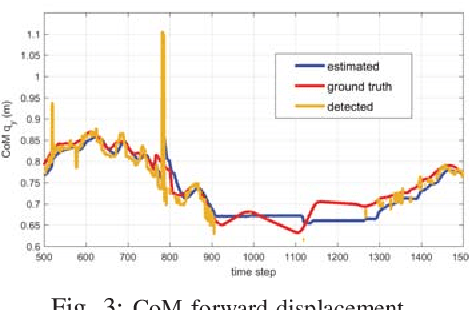

In this work, we present a novel framework for on-line human gait stability prediction of the elderly users of an intelligent robotic rollator using Long Short Term Memory (LSTM) networks, fusing multimodal RGB-D and Laser Range Finder (LRF) data from non-wearable sensors. A Deep Learning (DL) based approach is used for the upper body pose estimation. The detected pose is used for estimating the body Center of Mass (CoM) using Unscented Kalman Filter (UKF). An Augmented Gait State Estimation framework exploits the LRF data to estimate the legs' positions and the respective gait phase. These estimates are the inputs of an encoder-decoder sequence to sequence model which predicts the gait stability state as Safe or Fall Risk walking. It is validated with data from real patients, by exploring different network architectures, hyperparameter settings and by comparing the proposed method with other baselines. The presented LSTM-based human gait stability predictor is shown to provide robust predictions of the human stability state, and thus has the potential to be integrated into a general user-adaptive control architecture as a fall-risk alarm.
A Deep Learning Approach for Multi-View Engagement Estimation of Children in a Child-Robot Joint Attention task
Dec 01, 2018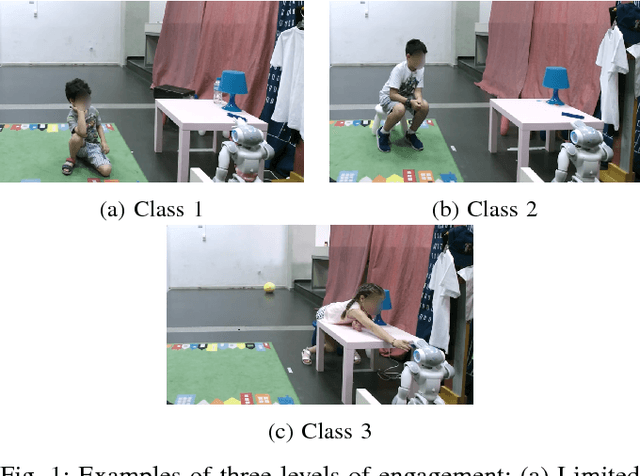
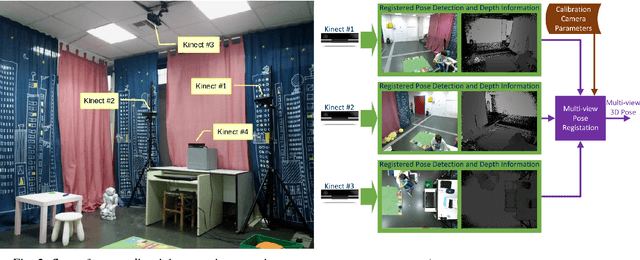
In this work we tackle the problem of child engagement estimation while children freely interact with a robot in their room. We propose a deep-based multi-view solution that takes advantage of recent developments in human pose detection. We extract the child's pose from different RGB-D cameras placed elegantly in the room, fuse the results and feed them to a deep neural network trained for classifying engagement levels. The deep network contains a recurrent layer, in order to exploit the rich temporal information contained in the pose data. The resulting method outperforms a number of baseline classifiers, and provides a promising tool for better automatic understanding of a child's attitude, interest and attention while cooperating with a robot. The goal is to integrate this model in next generation social robots as an attention monitoring tool during various CRI tasks both for Typically Developed (TD) children and children affected by autism (ASD).