 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning Approach for Multi-View Engagement Estimation of Children in a Child-Robot Joint Attention task
Paper and Code
Dec 01, 2018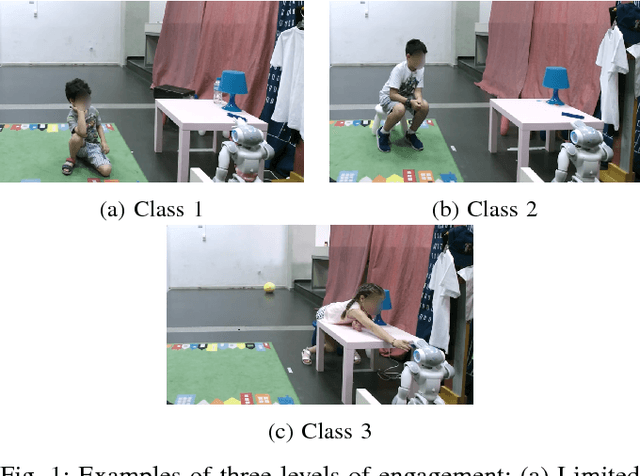
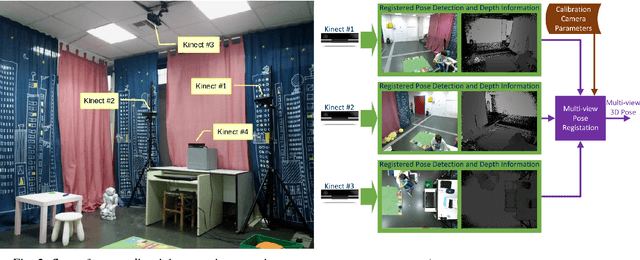
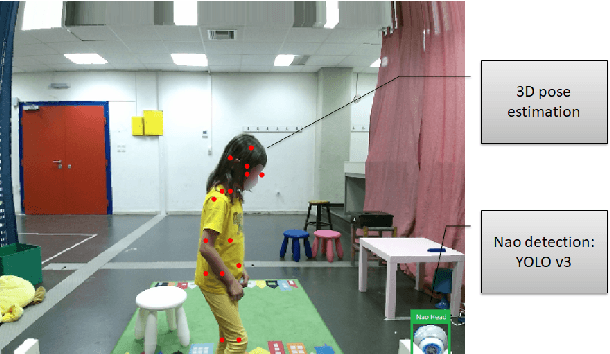
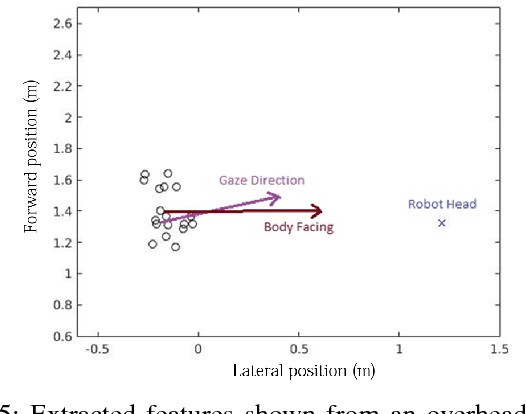
In this work we tackle the problem of child engagement estimation while children freely interact with a robot in their room. We propose a deep-based multi-view solution that takes advantage of recent developments in human pose detection. We extract the child's pose from different RGB-D cameras placed elegantly in the room, fuse the results and feed them to a deep neural network trained for classifying engagement levels. The deep network contains a recurrent layer, in order to exploit the rich temporal information contained in the pose data. The resulting method outperforms a number of baseline classifiers, and provides a promising tool for better automatic understanding of a child's attitude, interest and attention while cooperating with a robot. The goal is to integrate this model in next generation social robots as an attention monitoring tool during various CRI tasks both for Typically Developed (TD) children and children affected by autism (ASD).