 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProactive tactile exploration for object-agnostic shape reconstruction from minimal visual priors
May 17, 2025The perception of an object's surface is important for robotic applications enabling robust object manipulation. The level of accuracy in such a representation affects the outcome of the action planning, especially during tasks that require physical contact, e.g. grasping. In this paper, we propose a novel iterative method for 3D shape reconstruction consisting of two steps. At first, a mesh is fitted on data points acquired from the object's surface, based on a single primitive template. Subsequently, the mesh is properly adjusted to adequately represent local deformities. Moreover, a novel proactive tactile exploration strategy aims at minimizing the total uncertainty with the least number of contacts, while reducing the risk of contact failure in case the estimated surface differs significantly from the real one. The performance of the methodology is evaluated both in 3D simulation and on a real setup.
Localization and Offline Mapping of High-Voltage Substations in Rough Terrain Using a Ground Vehicle
Mar 28, 2024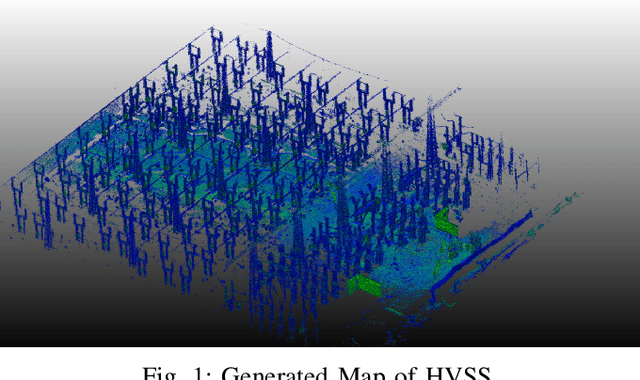

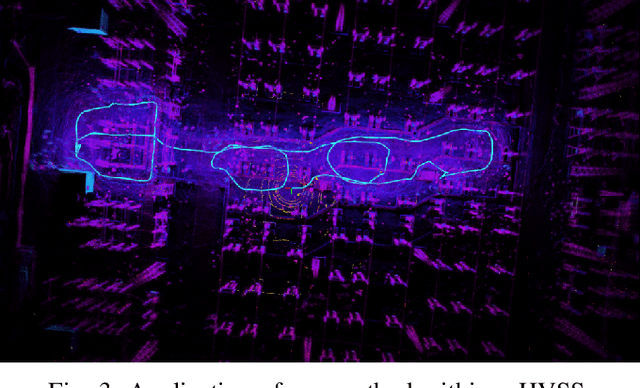
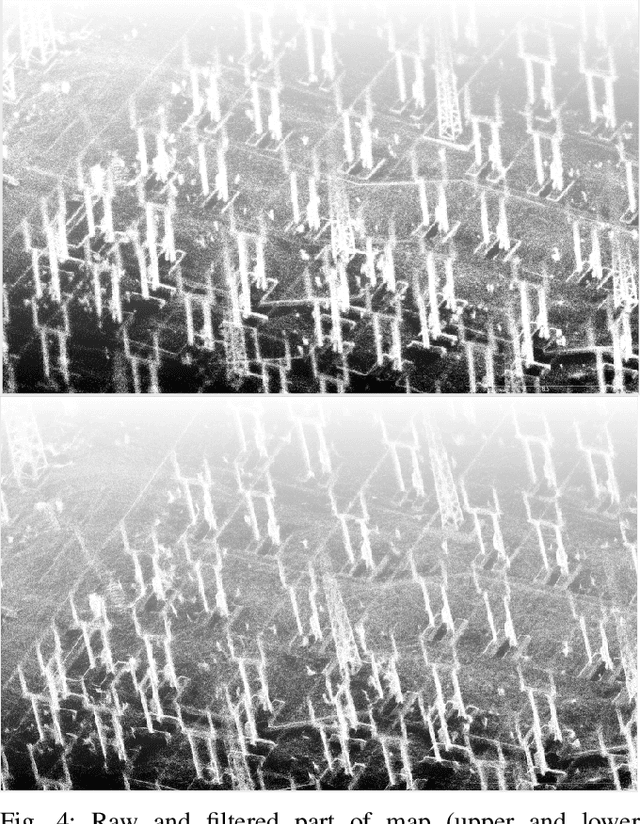
This paper proposes an efficient hybrid localization framework for the autonomous navigation of an unmanned ground vehicle in uneven or rough terrain, as well as techniques for detailed processing of 3D point cloud data. The framework is an extended version of FAST-LIO2 algorithm aiming at robust localization in known point cloud maps using Lidar and inertial data. The system is based on a hybrid scheme which allows the robot to not only localize in a pre-built map, but concurrently perform simultaneous localization and mapping to explore unknown scenes, and build extended maps aligned with the existing map. Our framework has been developed for the task of autonomous ground inspection of high-voltage electrical substations residing in rough terrain. We present the application of our algorithm in field trials, using a pre-built map of the substation, but also analyze techniques that aim to isolate the ground and its traversable regions, to allow the robot to approach points of interest within the map and perform inspection tasks using visual and thermal data.
A Comparative Study of Real-Time Implementable Cooperative Aerial Manipulation Systems
Mar 21, 2024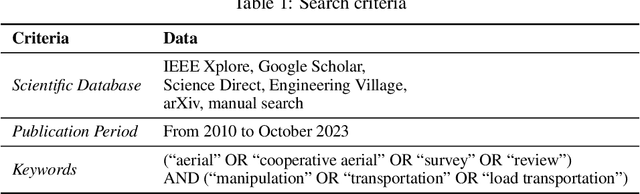
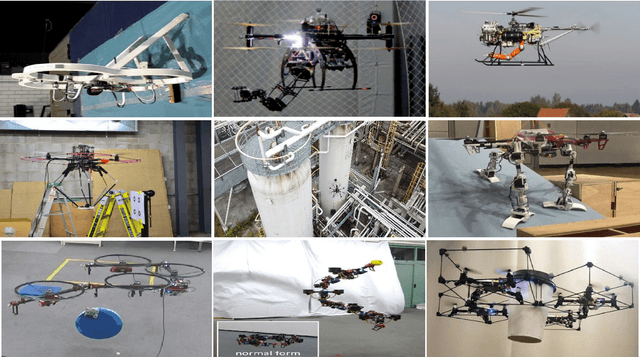
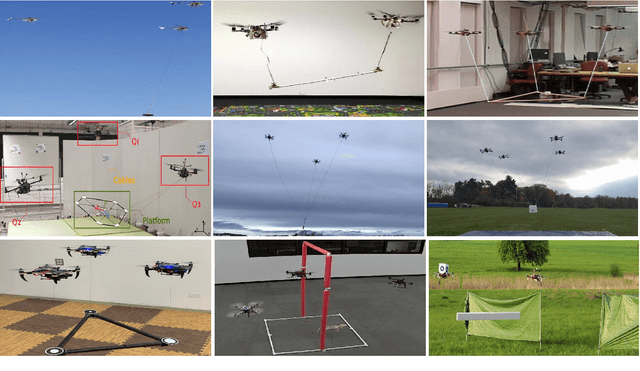
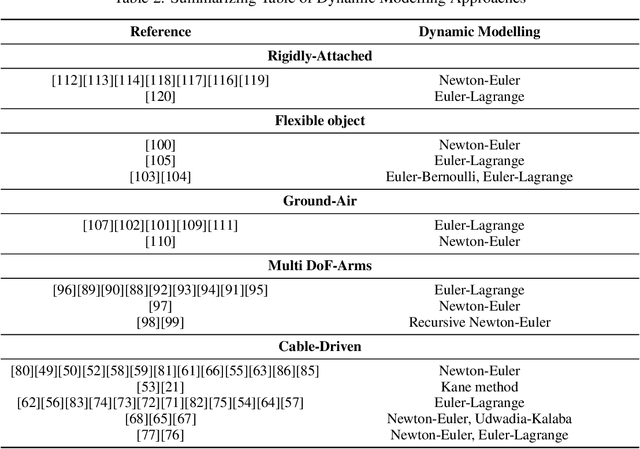
This survey paper focuses on quadrotor- and multirotor- based cooperative aerial manipulation. Emphasis is first given on comparing and evaluating prototype systems that have been implemented and tested in real-time in diverse application environments. Underlying modeling and control approaches are also discussed and compared. The outcome of the survey allows for understanding the motivation and rationale to develop such systems, their applicability and implementability in diverse applications and also challenges that need to be addressed and overcome. Moreover, the survey provides a guide to develop the next generation of prototype systems based on preferred characteristics, functionality, operability and application domain.
LSTM-based Network for Human Gait Stability Prediction in an Intelligent Robotic Rollator
Mar 05, 2019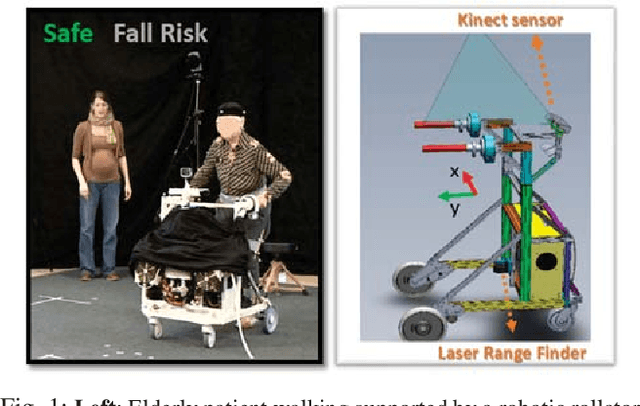
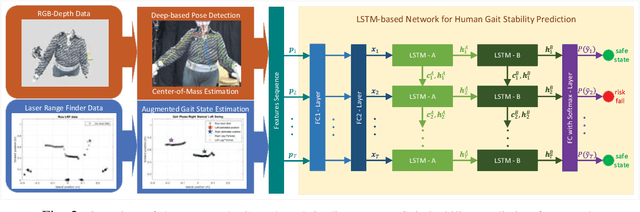
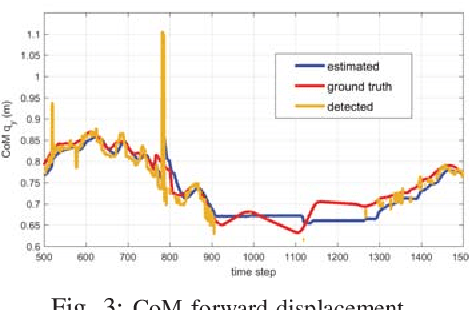

In this work, we present a novel framework for on-line human gait stability prediction of the elderly users of an intelligent robotic rollator using Long Short Term Memory (LSTM) networks, fusing multimodal RGB-D and Laser Range Finder (LRF) data from non-wearable sensors. A Deep Learning (DL) based approach is used for the upper body pose estimation. The detected pose is used for estimating the body Center of Mass (CoM) using Unscented Kalman Filter (UKF). An Augmented Gait State Estimation framework exploits the LRF data to estimate the legs' positions and the respective gait phase. These estimates are the inputs of an encoder-decoder sequence to sequence model which predicts the gait stability state as Safe or Fall Risk walking. It is validated with data from real patients, by exploring different network architectures, hyperparameter settings and by comparing the proposed method with other baselines. The presented LSTM-based human gait stability predictor is shown to provide robust predictions of the human stability state, and thus has the potential to be integrated into a general user-adaptive control architecture as a fall-risk alarm.
A Deep Learning Approach for Multi-View Engagement Estimation of Children in a Child-Robot Joint Attention task
Dec 01, 2018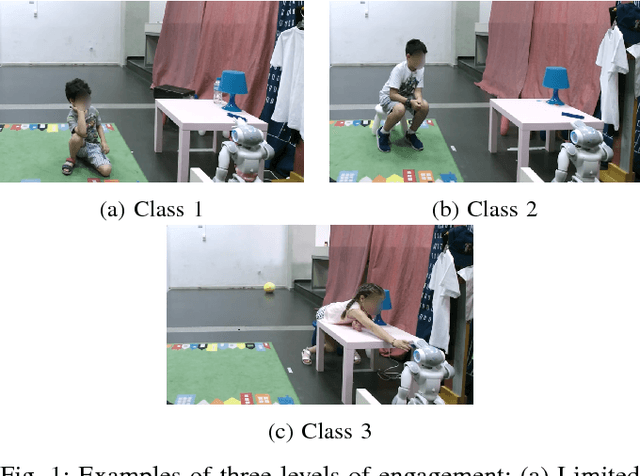
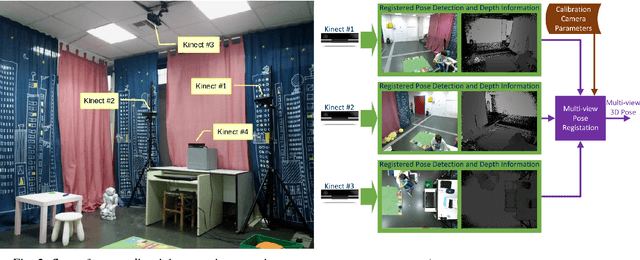
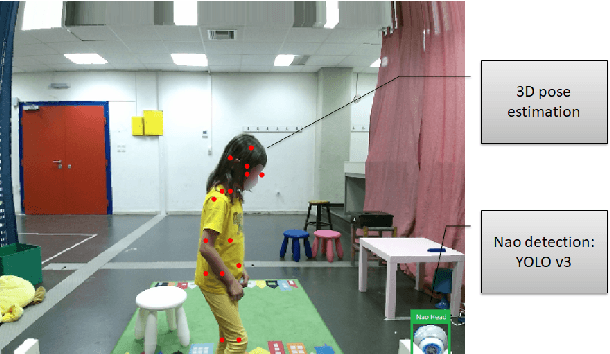
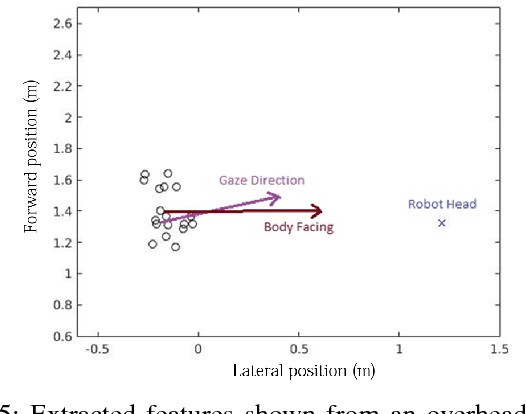
In this work we tackle the problem of child engagement estimation while children freely interact with a robot in their room. We propose a deep-based multi-view solution that takes advantage of recent developments in human pose detection. We extract the child's pose from different RGB-D cameras placed elegantly in the room, fuse the results and feed them to a deep neural network trained for classifying engagement levels. The deep network contains a recurrent layer, in order to exploit the rich temporal information contained in the pose data. The resulting method outperforms a number of baseline classifiers, and provides a promising tool for better automatic understanding of a child's attitude, interest and attention while cooperating with a robot. The goal is to integrate this model in next generation social robots as an attention monitoring tool during various CRI tasks both for Typically Developed (TD) children and children affected by autism (ASD).