Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of Real-Time Implementable Cooperative Aerial Manipulation Systems
Paper and Code
Mar 21, 2024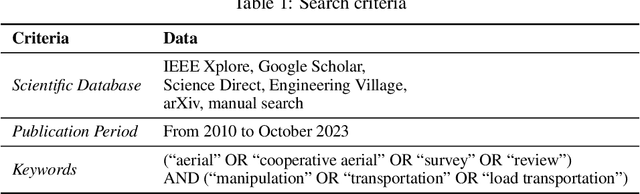
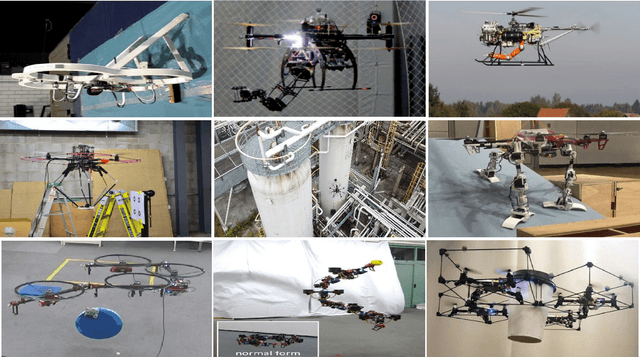
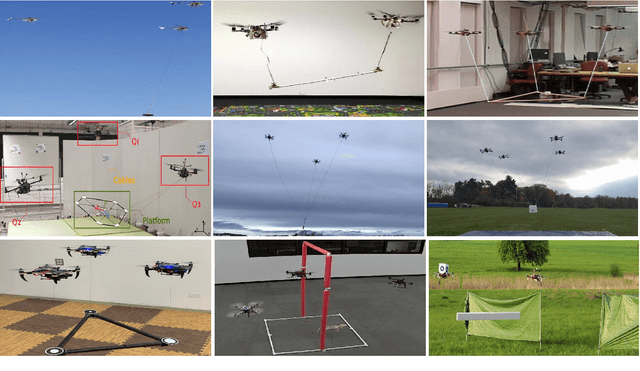
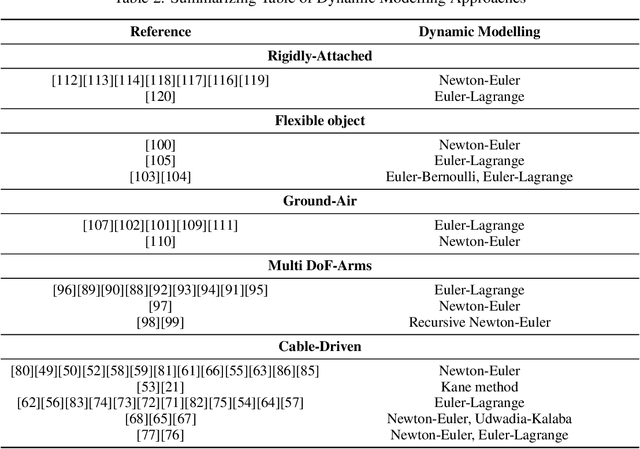
This survey paper focuses on quadrotor- and multirotor- based cooperative aerial manipulation. Emphasis is first given on comparing and evaluating prototype systems that have been implemented and tested in real-time in diverse application environments. Underlying modeling and control approaches are also discussed and compared. The outcome of the survey allows for understanding the motivation and rationale to develop such systems, their applicability and implementability in diverse applications and also challenges that need to be addressed and overcome. Moreover, the survey provides a guide to develop the next generation of prototype systems based on preferred characteristics, functionality, operability and application domain.
* Submitted to MDPI Drones
View paper on