 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimuScene: Simulation-Ready Compositional 3D Scene Reconstruction from a Single Image
Jun 02, 2026Reconstructing interactive, simulation-ready 3D scenes from a single image is a critical bottleneck for robotic manipulation. While recent single-image lifters recover plausible per-object shapes, composing them yields scenes that collapse under physical simulation due to interpenetrating, hovering, or sinking objects. Existing physics-aware methods address this strictly as a post-hoc layout correction, leaving the underlying geometric errors unresolved. To address this, we introduce SimuScene, a compositional 3D reconstruction pipeline that puts physics in the loop of shape and layout estimation. Rather than using physics merely for layout cleanup, we utilize the physics engine as a diagnostic measurement tool during the generative process itself. By diagnostically simulating reconstructed objects under gravity, we convert penetration and support failures into quantitative correction signals that drive gravity-axis stretching and amodal shape resampling. This physics-informed feedback loop mitigates accumulated reconstruction errors and produces a stable, simulation-ready compositional 3D scene. Extensive experiments demonstrate state-of-the-art performance on physical stability and geometric alignment benchmarks. We further highlight SimuScene's utility by deploying reconstructed environments in humanoid control and robot-arm manipulation tasks.
PERSE: Personalized 3D Generative Avatars from A Single Portrait
Dec 30, 2024We present PERSE, a method for building an animatable personalized generative avatar from a reference portrait. Our avatar model enables facial attribute editing in a continuous and disentangled latent space to control each facial attribute, while preserving the individual's identity. To achieve this, our method begins by synthesizing large-scale synthetic 2D video datasets, where each video contains consistent changes in the facial expression and viewpoint, combined with a variation in a specific facial attribute from the original input. We propose a novel pipeline to produce high-quality, photorealistic 2D videos with facial attribute editing. Leveraging this synthetic attribute dataset, we present a personalized avatar creation method based on the 3D Gaussian Splatting, learning a continuous and disentangled latent space for intuitive facial attribute manipulation. To enforce smooth transitions in this latent space, we introduce a latent space regularization technique by using interpolated 2D faces as supervision. Compared to previous approaches, we demonstrate that PERSE generates high-quality avatars with interpolated attributes while preserving identity of reference person.
Guess The Unseen: Dynamic 3D Scene Reconstruction from Partial 2D Glimpses
Apr 22, 2024In this paper, we present a method to reconstruct the world and multiple dynamic humans in 3D from a monocular video input. As a key idea, we represent both the world and multiple humans via the recently emerging 3D Gaussian Splatting (3D-GS) representation, enabling to conveniently and efficiently compose and render them together. In particular, we address the scenarios with severely limited and sparse observations in 3D human reconstruction, a common challenge encountered in the real world. To tackle this challenge, we introduce a novel approach to optimize the 3D-GS representation in a canonical space by fusing the sparse cues in the common space, where we leverage a pre-trained 2D diffusion model to synthesize unseen views while keeping the consistency with the observed 2D appearances. We demonstrate our method can reconstruct high-quality animatable 3D humans in various challenging examples, in the presence of occlusion, image crops, few-shot, and extremely sparse observations. After reconstruction, our method is capable of not only rendering the scene in any novel views at arbitrary time instances, but also editing the 3D scene by removing individual humans or applying different motions for each human. Through various experiments, we demonstrate the quality and efficiency of our methods over alternative existing approaches.
Siamese Learning-based Monarch Butterfly Localization
Jul 04, 2023



A new GPS-less, daily localization method is proposed with deep learning sensor fusion that uses daylight intensity and temperature sensor data for Monarch butterfly tracking. Prior methods suffer from the location-independent day length during the equinox, resulting in high localization errors around that date. This work proposes a new Siamese learning-based localization model that improves the accuracy and reduces the bias of daily Monarch butterfly localization using light and temperature measurements. To train and test the proposed algorithm, we use $5658$ daily measurement records collected through a data measurement campaign involving 306 volunteers across the U.S., Canada, and Mexico from 2018 to 2020. This model achieves a mean absolute error of $1.416^\circ$ in latitude and $0.393^\circ$ in longitude coordinates outperforming the prior method.
Migrating Monarch Butterfly Localization Using Multi-Sensor Fusion Neural Networks
Dec 14, 2019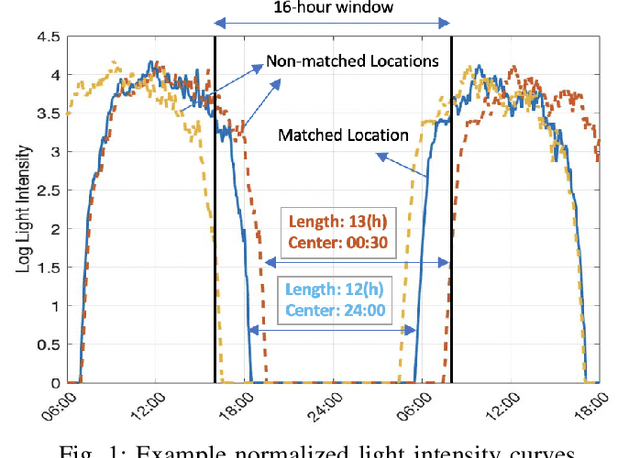
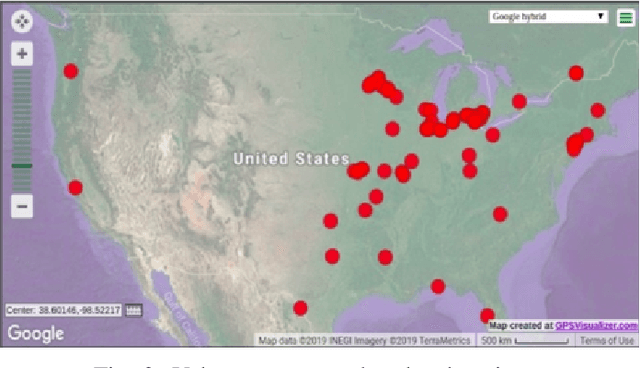
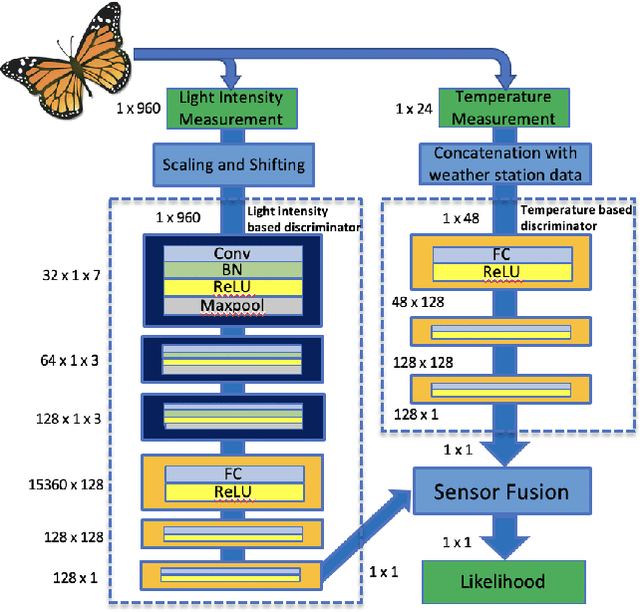
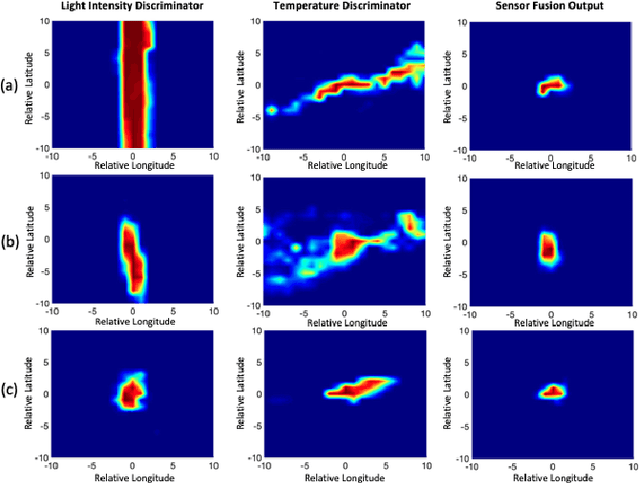
Details of Monarch butterfly migration from the U.S. to Mexico remain a mystery due to lack of a proper localization technology to accurately localize and track butterfly migration. In this paper, we propose a deep learning based butterfly localization algorithm that can estimate a butterfly's daily location by analyzing a light and temperature sensor data log continuously obtained from an ultra-low power, mm-scale sensor attached to the butterfly. To train and test the proposed neural network based multi-sensor fusion localization algorithm, we collected over 1500 days of real world sensor measurement data with 82 volunteers all over the U.S. The proposed algorithm exhibits a mean absolute error of <1.5 degree in latitude and <0.5 degree in longitude Earth coordinate, satisfying our target goal for the Monarch butterfly migration study.