 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSiamese Learning-based Monarch Butterfly Localization
Jul 04, 2023



A new GPS-less, daily localization method is proposed with deep learning sensor fusion that uses daylight intensity and temperature sensor data for Monarch butterfly tracking. Prior methods suffer from the location-independent day length during the equinox, resulting in high localization errors around that date. This work proposes a new Siamese learning-based localization model that improves the accuracy and reduces the bias of daily Monarch butterfly localization using light and temperature measurements. To train and test the proposed algorithm, we use $5658$ daily measurement records collected through a data measurement campaign involving 306 volunteers across the U.S., Canada, and Mexico from 2018 to 2020. This model achieves a mean absolute error of $1.416^\circ$ in latitude and $0.393^\circ$ in longitude coordinates outperforming the prior method.
Migrating Monarch Butterfly Localization Using Multi-Sensor Fusion Neural Networks
Dec 14, 2019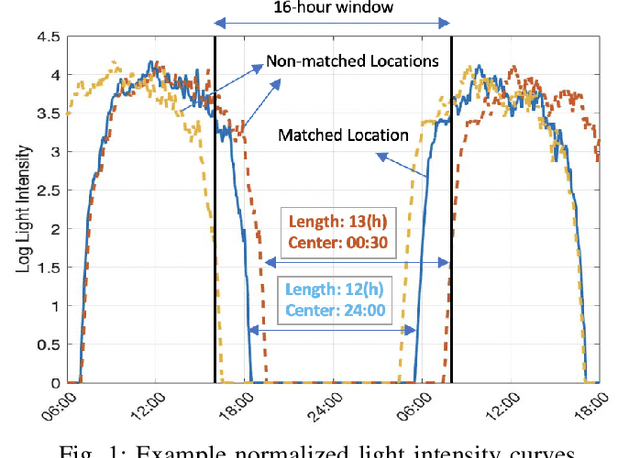
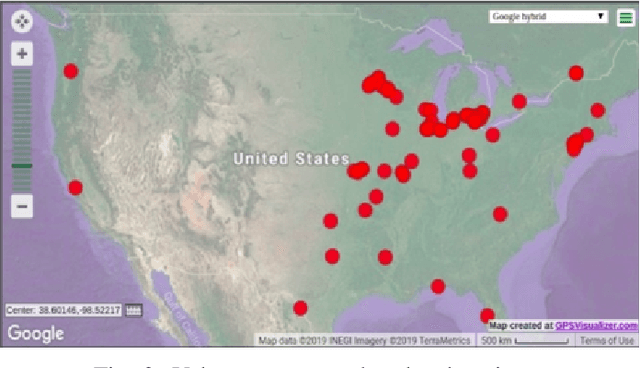
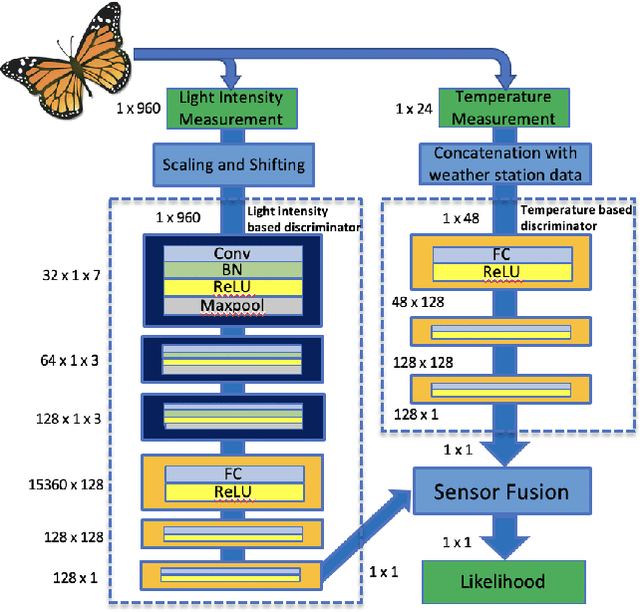
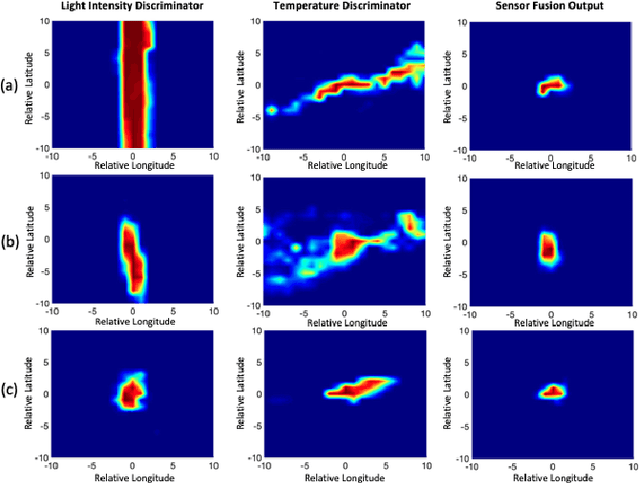
Details of Monarch butterfly migration from the U.S. to Mexico remain a mystery due to lack of a proper localization technology to accurately localize and track butterfly migration. In this paper, we propose a deep learning based butterfly localization algorithm that can estimate a butterfly's daily location by analyzing a light and temperature sensor data log continuously obtained from an ultra-low power, mm-scale sensor attached to the butterfly. To train and test the proposed neural network based multi-sensor fusion localization algorithm, we collected over 1500 days of real world sensor measurement data with 82 volunteers all over the U.S. The proposed algorithm exhibits a mean absolute error of <1.5 degree in latitude and <0.5 degree in longitude Earth coordinate, satisfying our target goal for the Monarch butterfly migration study.