 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMillimeter-Wave Sensing for Avoidance of High-Risk Ground Conditions for Mobile Robots
Mar 30, 2022
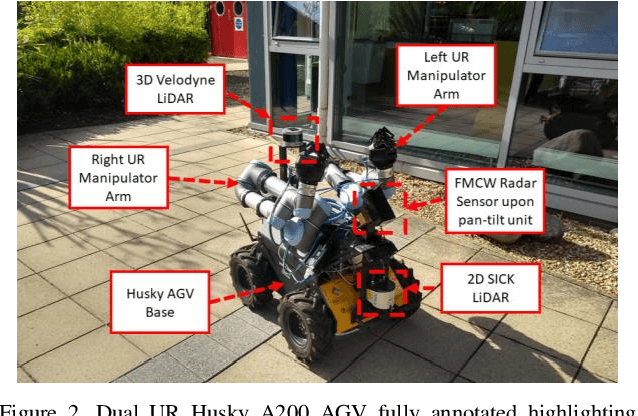
Mobile robot autonomy has made significant advances in recent years, with navigation algorithms well developed and used commercially in certain well-defined environments, such as warehouses. The common link in usage scenarios is that the environments in which the robots are utilized have a high degree of certainty. Operating environments are often designed to be robot friendly, for example augmented reality markers are strategically placed and the ground is typically smooth, level, and clear of debris. For robots to be useful in a wider range of environments, especially environments that are not sanitized for their use, robots must be able to handle uncertainty. This requires a robot to incorporate new sensors and sources of information, and to be able to use this information to make decisions regarding navigation and the overall mission. When using autonomous mobile robots in unstructured and poorly defined environments, such as a natural disaster site or in a rural environment, ground condition is of critical importance and is a common cause of failure. Examples include loss of traction due to high levels of ground water, hidden cavities, or material boundary failures. To evaluate a non-contact sensing method to mitigate these risks, Frequency Modulated Continuous Wave (FMCW) radar is integrated with an Unmanned Ground Vehicle (UGV), representing a novel application of FMCW to detect new measurands for Robotic Autonomous Systems (RAS) navigation, informing on terrain integrity and adding to the state-of-the-art in sensing for optimized autonomous path planning. In this paper, the FMCW is first evaluated in a desktop setting to determine its performance in anticipated ground conditions. The FMCW is then fixed to a UGV and the sensor system is tested and validated in a representative environment containing regions with significant levels of ground water saturation.
Addressing Non-Intervention Challenges via Resilient Robotics utilizing a Digital Twin
Mar 29, 2022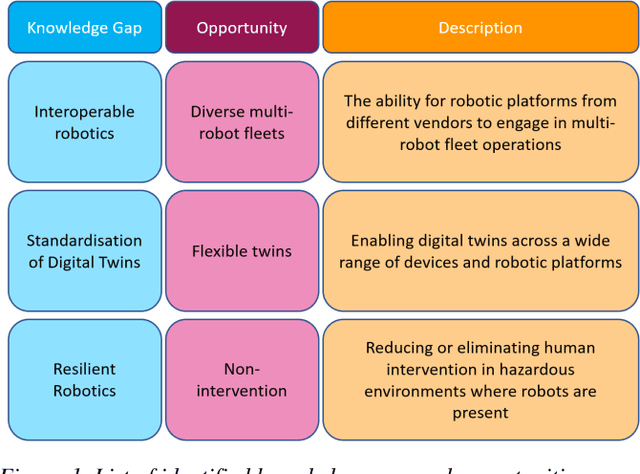

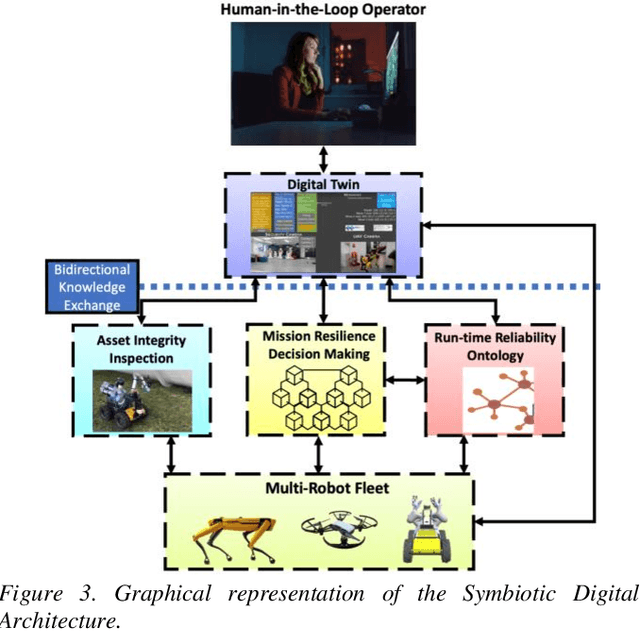
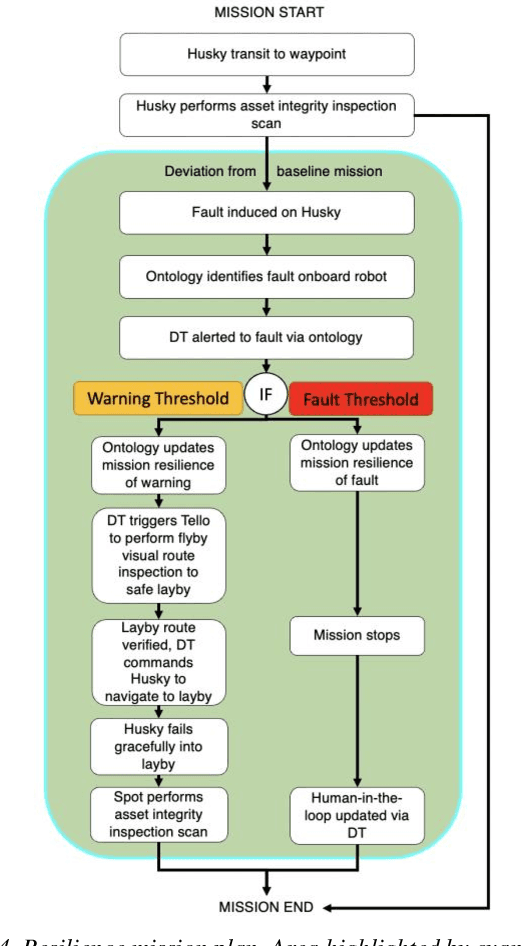
Multi-robot systems face challenges in reducing human interventions as they are often deployed in dangerous environments. It is therefore necessary to include a methodology to assess robot failure rates to reduce the requirement for costly human intervention. A solution to this problem includes robots with the ability to work together to ensure mission resilience. To prevent this intervention, robots should be able to work together to ensure mission resilience. However, robotic platforms generally lack built-in interconnectivity with other platforms from different vendors. This work aims to tackle this issue by enabling the functionality through a bidirectional digital twin. The twin enables the human operator to transmit and receive information to and from the multi-robot fleet. This digital twin considers mission resilience, decision making and a run-time reliability ontology for failure detection to enable the resilience of a multi-robot fleet. This creates the cooperation, corroboration, and collaboration of diverse robots to leverage the capability of robots and support recovery of a failed robot.
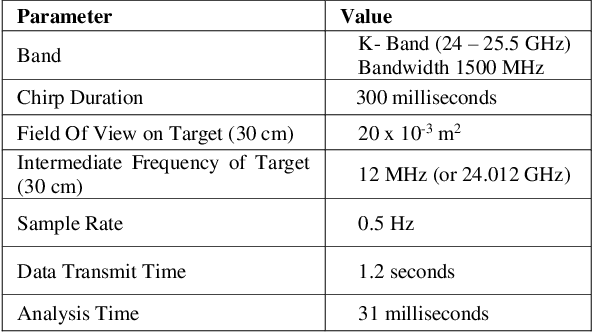
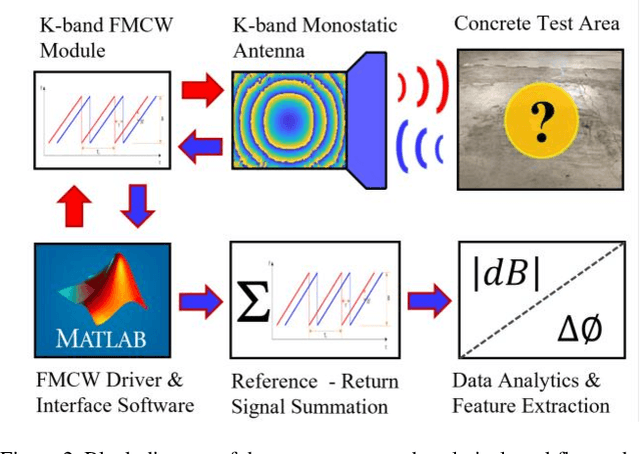
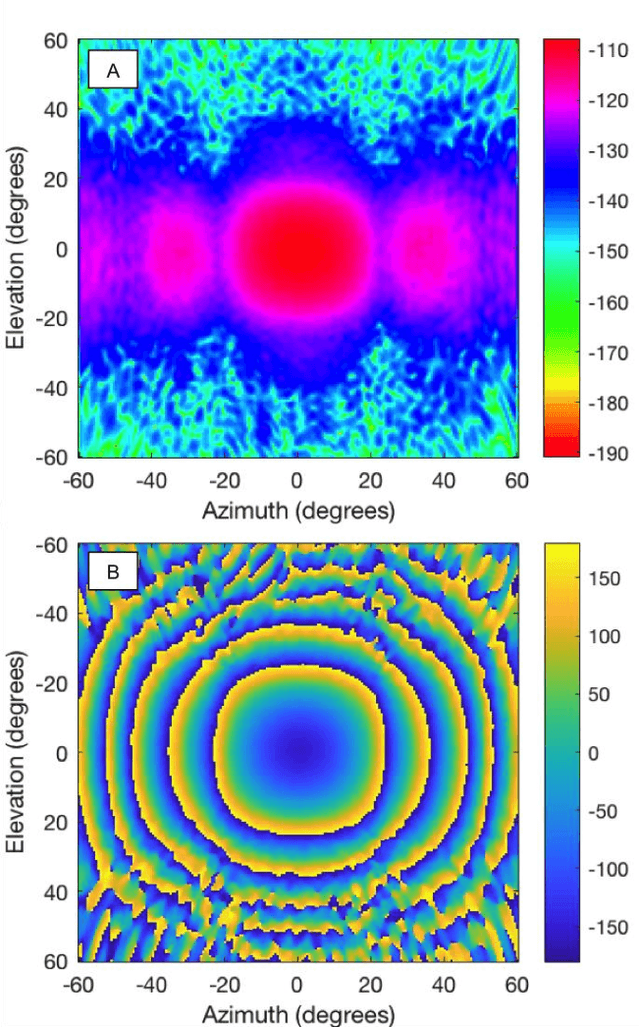
Millimeter-wave Foresight Sensing for Safety and Resilience in Autonomous Operations
Mar 24, 2022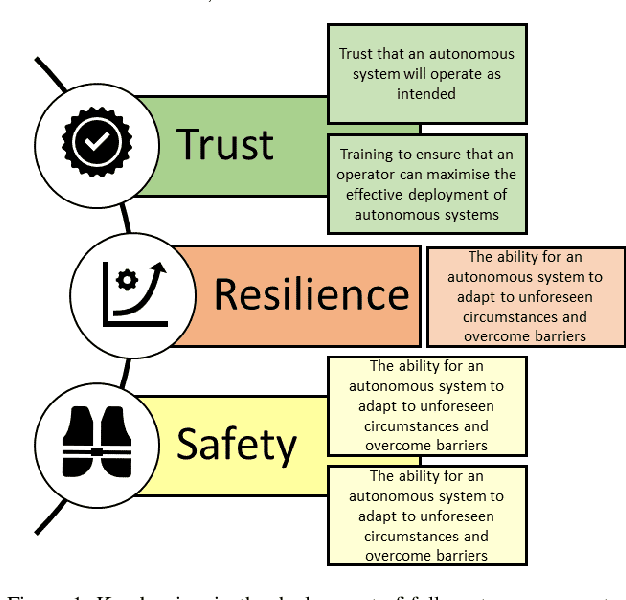
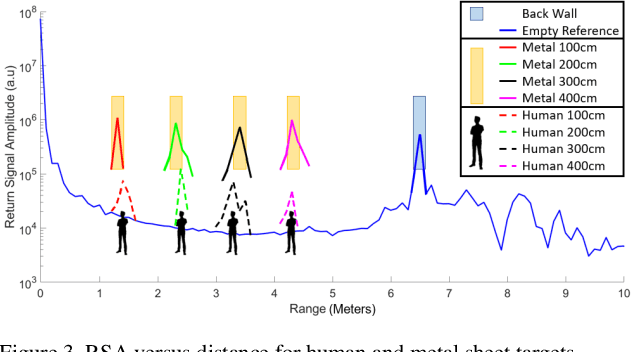

Robotic platforms are highly programmable, scalable and versatile to complete several tasks including Inspection, Maintenance and Repair (IMR). Mobile robotics offer reduced restrictions in operating environments, resulting in greater flexibility; operation at height, dangerous areas and repetitive tasks. Cyber physical infrastructures have been identified by the UK Robotics Growth Partnership as a key enabler in how we utilize and interact with sensors and machines via the virtual and physical worlds. Cyber Physical Systems (CPS) allow for robotics and artificial intelligence to adapt and repurpose at pace, allowing for the addressment of new challenges in CPS. A challenge exists within robotics to secure an effective partnership in a wide range of areas which include shared workspaces and Beyond Visual Line of Sight (BVLOS). Robotic manipulation abilities have improved a robots accessibility via the ability to open doorways, however, challenges exist in how a robot decides if it is safe to move into a new workspace. Current sensing methods are limited to line of sight and are unable to capture data beyond doorways or walls, therefore, a robot is unable to sense if it is safe to open a door. Another limitation exists as robots are unable to detect if a human is within a shared workspace. Therefore, if a human is detected, extended safety precautions can be taken to ensure the safe autonomous operation of a robot. These challenges are represented as safety, trust and resilience, inhibiting the successful advancement of CPS. This paper evaluates the use of frequency modulated continuous wave radar sensing for human detection and through-wall detection to increase situational awareness. The results validate the use of the sensor to detect the difference between a person and infrastructure, and increased situational awareness for navigation via foresight monitoring through walls.
Bio-inspired Multi-robot Autonomy
Mar 15, 2022

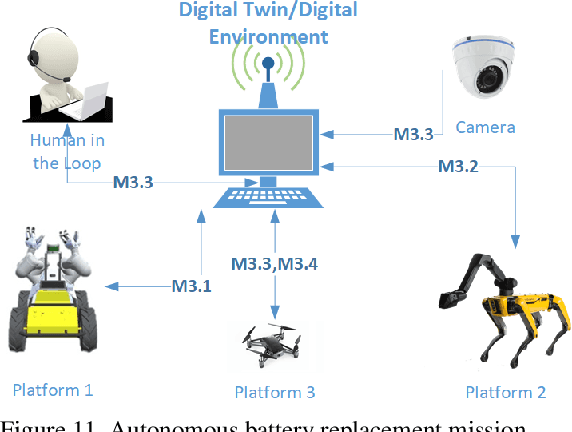
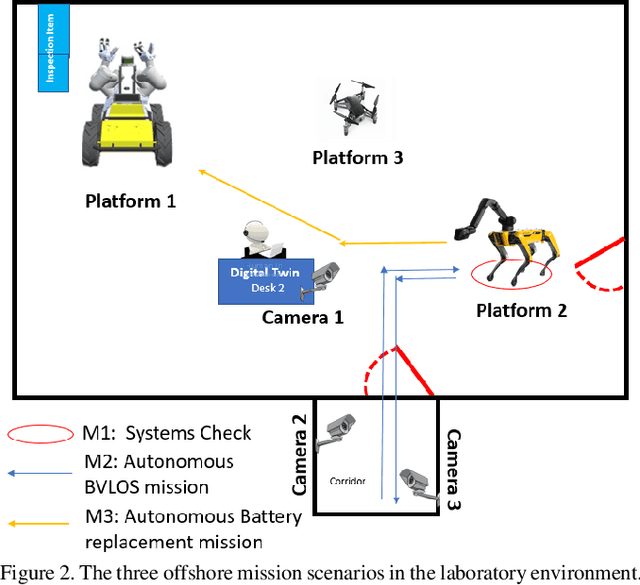
Increasingly, high value industrial markets are driving trends for improved functionality and resilience from resident autonomous systems. This led to an increase in multi-robot fleets that aim to leverage the complementary attributes of the diverse platforms. In this paper we introduce a novel bio-inspired Symbiotic System of Systems Approach (SSOSA) for designing the operational governance of a multi-robot fleet consisting of ground-based quadruped and wheeled platforms. SSOSA couples the MR-fleet to the resident infrastructure monitoring systems into one collaborative digital commons. The hyper visibility of the integrated distributed systems, achieved through a latency bidirectional communication network, supports collaboration, coordination and corroboration (3C) across the integrated systems. In our experiment, we demonstrate how an operator can activate a pre-determined autonomous mission and utilize SSOSA to overcome intrinsic and external risks to the autonomous missions. We demonstrate how resilience can be enhanced by local collaboration between SPOT and Husky wherein we detect a replacement battery, and utilize the manipulator arm of SPOT to support a Clearpath Husky A200 wheeled robotic platform. This allows for increased resilience of an autonomous mission as robots can collaborate to ensure the battery state of the Husky robot. Overall, these initial results demonstrate the value of a SSOSA approach in addressing a key operational barrier to scalable autonomy, the resilience.