 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBio-inspired Multi-robot Autonomy
Mar 15, 2022

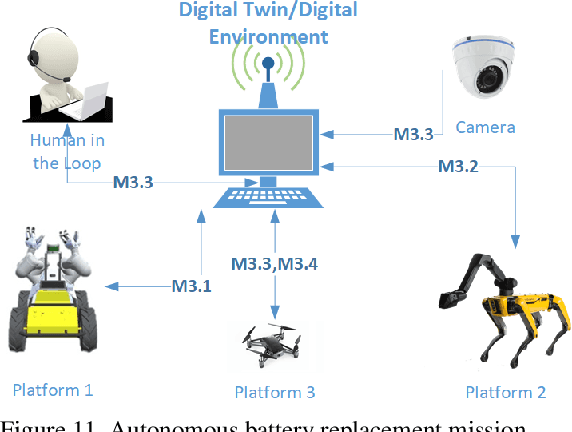
Increasingly, high value industrial markets are driving trends for improved functionality and resilience from resident autonomous systems. This led to an increase in multi-robot fleets that aim to leverage the complementary attributes of the diverse platforms. In this paper we introduce a novel bio-inspired Symbiotic System of Systems Approach (SSOSA) for designing the operational governance of a multi-robot fleet consisting of ground-based quadruped and wheeled platforms. SSOSA couples the MR-fleet to the resident infrastructure monitoring systems into one collaborative digital commons. The hyper visibility of the integrated distributed systems, achieved through a latency bidirectional communication network, supports collaboration, coordination and corroboration (3C) across the integrated systems. In our experiment, we demonstrate how an operator can activate a pre-determined autonomous mission and utilize SSOSA to overcome intrinsic and external risks to the autonomous missions. We demonstrate how resilience can be enhanced by local collaboration between SPOT and Husky wherein we detect a replacement battery, and utilize the manipulator arm of SPOT to support a Clearpath Husky A200 wheeled robotic platform. This allows for increased resilience of an autonomous mission as robots can collaborate to ensure the battery state of the Husky robot. Overall, these initial results demonstrate the value of a SSOSA approach in addressing a key operational barrier to scalable autonomy, the resilience.
Symbiotic System Design for Safe and Resilient Autonomous Robotics in Offshore Wind Farms
Jan 23, 2021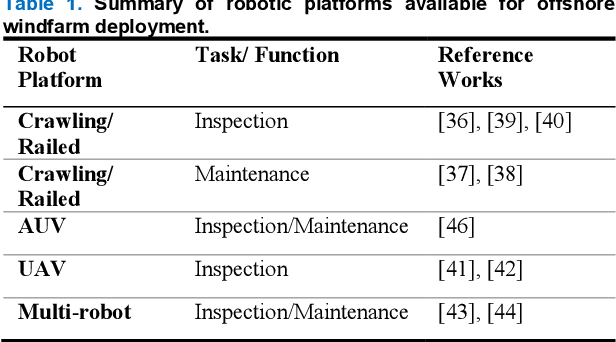

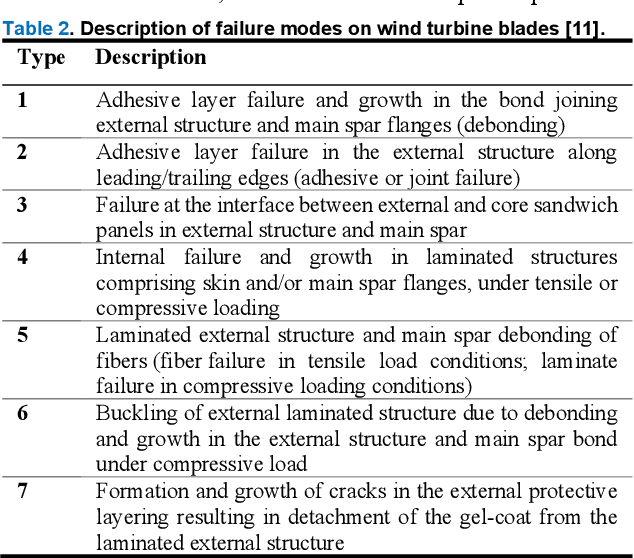
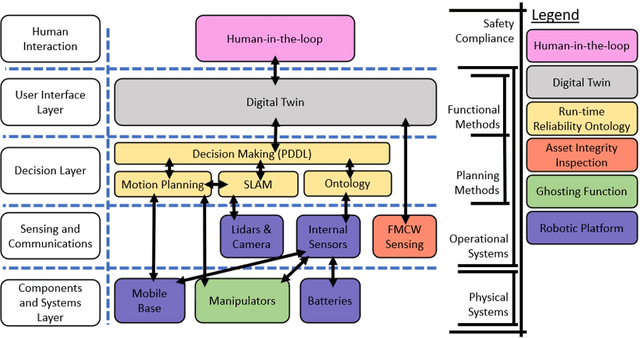
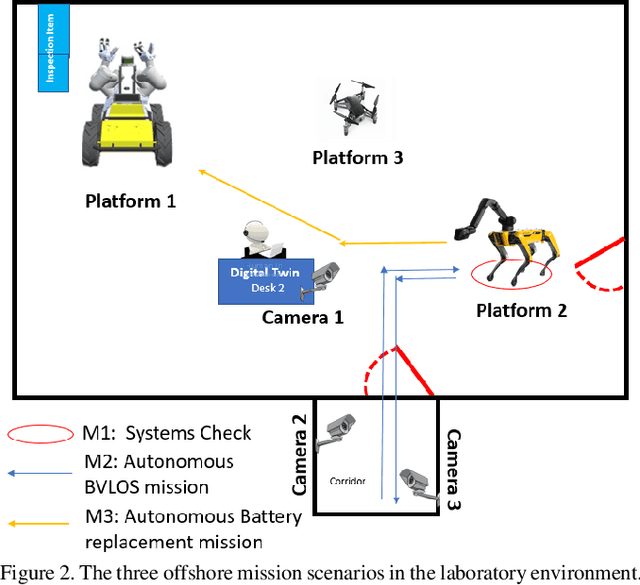
To reduce Operation and Maintenance (O&M) costs on offshore wind farms, wherein 80% of the O&M cost relates to deploying personnel, the offshore wind sector looks to robotics and Artificial Intelligence (AI) for solutions. Barriers to Beyond Visual Line of Sight (BVLOS) robotics include operational safety compliance and resilience, inhibiting the commercialization of autonomous services offshore. To address safety and resilience challenges we propose a symbiotic system; reflecting the lifecycle learning and co-evolution with knowledge sharing for mutual gain of robotic platforms and remote human operators. Our methodology enables the run-time verification of safety, reliability and resilience during autonomous missions. We synchronize digital models of the robot, environment and infrastructure and integrate front-end analytics and bidirectional communication for autonomous adaptive mission planning and situation reporting to a remote operator. A reliability ontology for the deployed robot, based on our holistic hierarchical-relational model, supports computationally efficient platform data analysis. We analyze the mission status and diagnostics of critical sub-systems within the robot to provide automatic updates to our run-time reliability ontology, enabling faults to be translated into failure modes for decision making during the mission. We demonstrate an asset inspection mission within a confined space and employ millimeter-wave sensing to enhance situational awareness to detect the presence of obscured personnel to mitigate risk. Our results demonstrate a symbiotic system provides an enhanced resilience capability to BVLOS missions. A symbiotic system addresses the operational challenges and reprioritization of autonomous mission objectives. This advances the technology required to achieve fully trustworthy autonomous systems.