 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMillimeter-Wave Sensing for Avoidance of High-Risk Ground Conditions for Mobile Robots
Mar 30, 2022
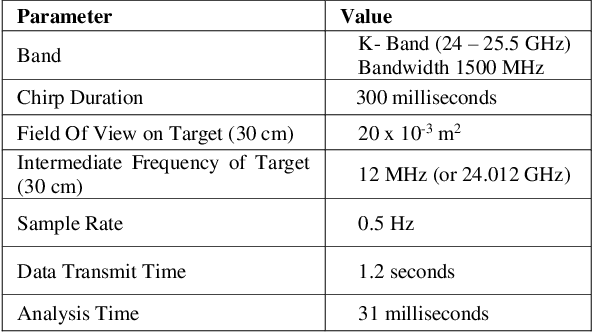
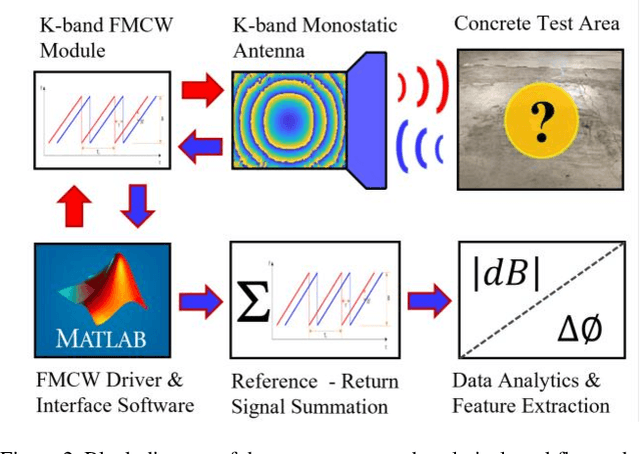
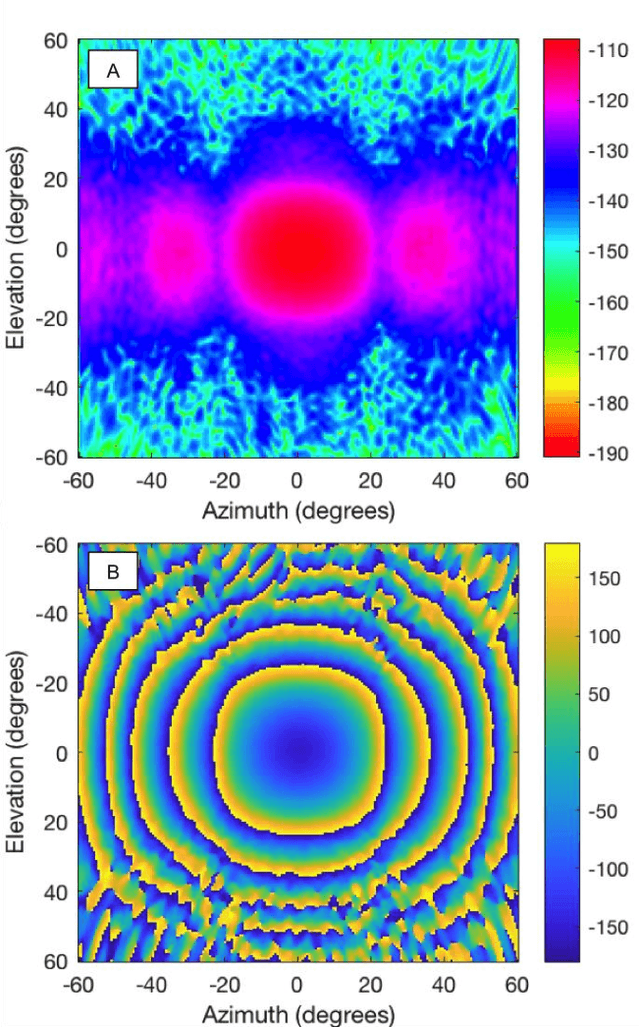
Mobile robot autonomy has made significant advances in recent years, with navigation algorithms well developed and used commercially in certain well-defined environments, such as warehouses. The common link in usage scenarios is that the environments in which the robots are utilized have a high degree of certainty. Operating environments are often designed to be robot friendly, for example augmented reality markers are strategically placed and the ground is typically smooth, level, and clear of debris. For robots to be useful in a wider range of environments, especially environments that are not sanitized for their use, robots must be able to handle uncertainty. This requires a robot to incorporate new sensors and sources of information, and to be able to use this information to make decisions regarding navigation and the overall mission. When using autonomous mobile robots in unstructured and poorly defined environments, such as a natural disaster site or in a rural environment, ground condition is of critical importance and is a common cause of failure. Examples include loss of traction due to high levels of ground water, hidden cavities, or material boundary failures. To evaluate a non-contact sensing method to mitigate these risks, Frequency Modulated Continuous Wave (FMCW) radar is integrated with an Unmanned Ground Vehicle (UGV), representing a novel application of FMCW to detect new measurands for Robotic Autonomous Systems (RAS) navigation, informing on terrain integrity and adding to the state-of-the-art in sensing for optimized autonomous path planning. In this paper, the FMCW is first evaluated in a desktop setting to determine its performance in anticipated ground conditions. The FMCW is then fixed to a UGV and the sensor system is tested and validated in a representative environment containing regions with significant levels of ground water saturation.
Addressing Non-Intervention Challenges via Resilient Robotics utilizing a Digital Twin
Mar 29, 2022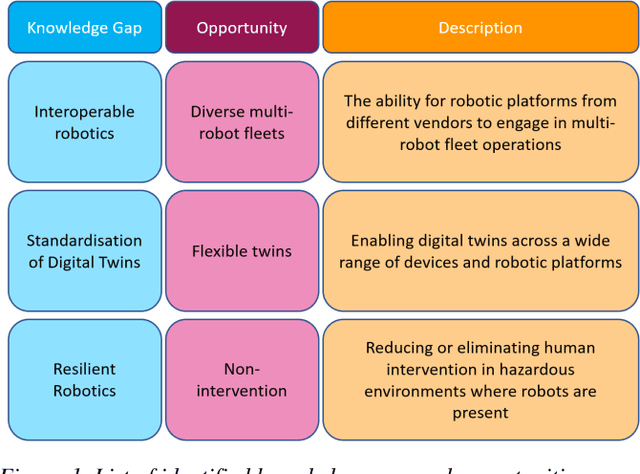

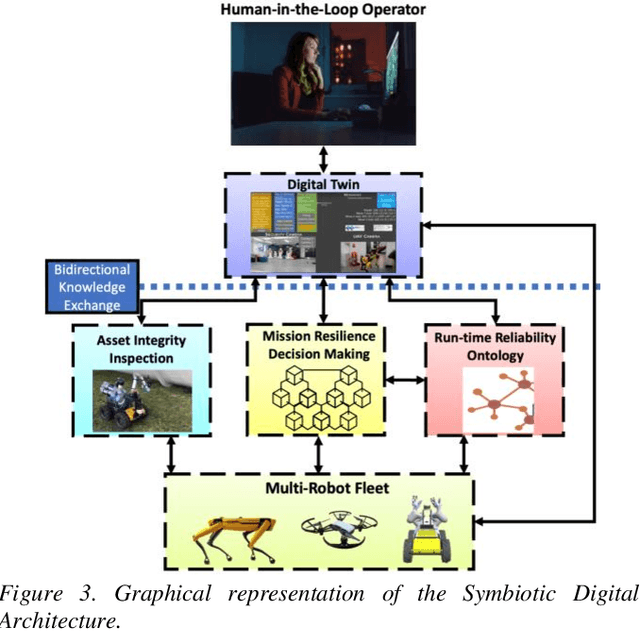
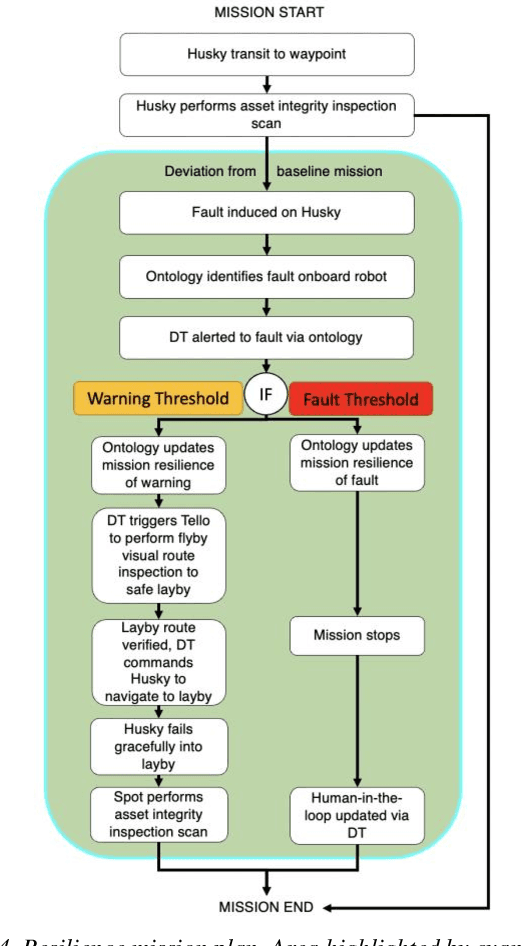
Multi-robot systems face challenges in reducing human interventions as they are often deployed in dangerous environments. It is therefore necessary to include a methodology to assess robot failure rates to reduce the requirement for costly human intervention. A solution to this problem includes robots with the ability to work together to ensure mission resilience. To prevent this intervention, robots should be able to work together to ensure mission resilience. However, robotic platforms generally lack built-in interconnectivity with other platforms from different vendors. This work aims to tackle this issue by enabling the functionality through a bidirectional digital twin. The twin enables the human operator to transmit and receive information to and from the multi-robot fleet. This digital twin considers mission resilience, decision making and a run-time reliability ontology for failure detection to enable the resilience of a multi-robot fleet. This creates the cooperation, corroboration, and collaboration of diverse robots to leverage the capability of robots and support recovery of a failed robot.
A Review: Challenges and Opportunities for Artificial Intelligence and Robotics in the Offshore Wind Sector
Dec 13, 2021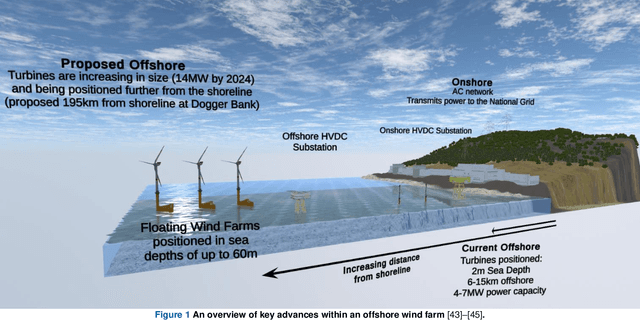
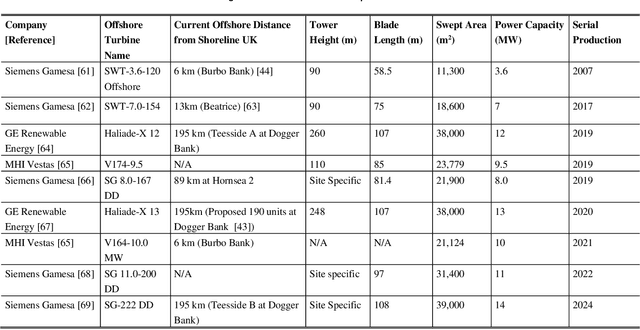
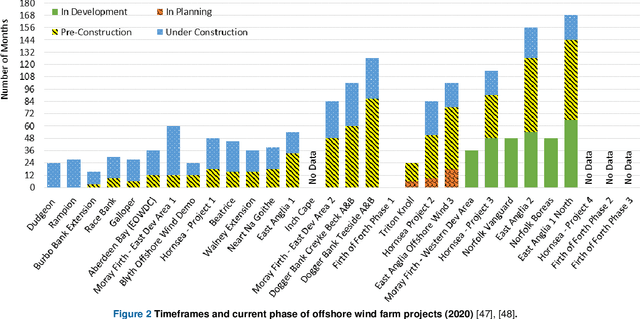

A global trend in increasing wind turbine size and distances from shore is emerging within the rapidly growing offshore wind farm market. In the UK, the offshore wind sector produced its highest amount of electricity in the UK in 2019, a 19.6% increase on the year before. Currently, the UK is set to increase production further, targeting a 74.7% increase of installed turbine capacity as reflected in recent Crown Estate leasing rounds. With such tremendous growth, the sector is now looking to Robotics and Artificial Intelligence (RAI) in order to tackle lifecycle service barriers as to support sustainable and profitable offshore wind energy production. Today, RAI applications are predominately being used to support short term objectives in operation and maintenance. However, moving forward, RAI has the potential to play a critical role throughout the full lifecycle of offshore wind infrastructure, from surveying, planning, design, logistics, operational support, training and decommissioning. This paper presents one of the first systematic reviews of RAI for the offshore renewable energy sector. The state-of-the-art in RAI is analyzed with respect to offshore energy requirements, from both industry and academia, in terms of current and future requirements. Our review also includes a detailed evaluation of investment, regulation and skills development required to support the adoption of RAI. The key trends identified through a detailed analysis of patent and academic publication databases provide insights to barriers such as certification of autonomous platforms for safety compliance and reliability, the need for digital architectures for scalability in autonomous fleets, adaptive mission planning for resilient resident operations and optimization of human machine interaction for trusted partnerships between people and autonomous assistants.