 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConfined Space Underwater Positioning Using Collaborative Robots
Oct 31, 2025Positioning of underwater robots in confined and cluttered spaces remains a key challenge for field operations. Existing systems are mostly designed for large, open-water environments and struggle in industrial settings due to poor coverage, reliance on external infrastructure, and the need for feature-rich surroundings. Multipath effects from continuous sound reflections further degrade signal quality, reducing accuracy and reliability. Accurate and easily deployable positioning is essential for repeatable autonomous missions; however, this requirement has created a technological bottleneck limiting underwater robotic deployment. This paper presents the Collaborative Aquatic Positioning (CAP) system, which integrates collaborative robotics and sensor fusion to overcome these limitations. Inspired by the "mother-ship" concept, the surface vehicle acts as a mobile leader to assist in positioning a submerged robot, enabling localization even in GPS-denied and highly constrained environments. The system is validated in a large test tank through repeatable autonomous missions using CAP's position estimates for real-time trajectory control. Experimental results demonstrate a mean Euclidean distance (MED) error of 70 mm, achieved in real time without requiring fixed infrastructure, extensive calibration, or environmental features. CAP leverages advances in mobile robot sensing and leader-follower control to deliver a step change in accurate, practical, and infrastructure-free underwater localization.
Collaborative Aquatic Positioning System Utilising Multi-beam Sonar and Depth Sensors
Mar 18, 2024



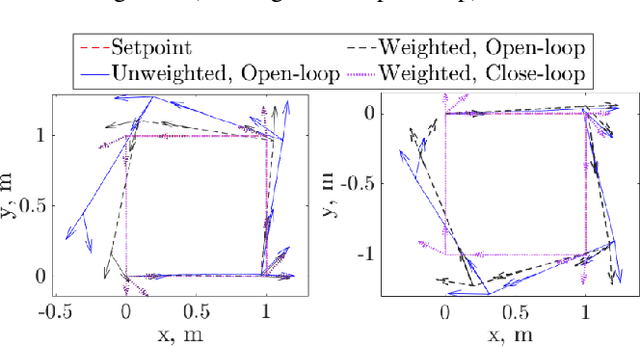
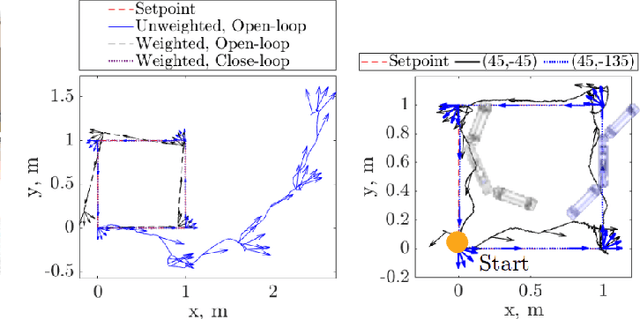
Accurate positioning of remotely operated underwater vehicles (ROVs) in confined environments is crucial for inspection and mapping tasks and is also a prerequisite for autonomous operations. Presently, there are no positioning systems available that are suited for real-world use in confined underwater environments, unconstrained by environmental lighting and water turbidity levels and have sufficient accuracy for long-term, reliable and repeatable navigation. This shortage presents a significant barrier to enhancing the capabilities of ROVs in such scenarios. This paper introduces an innovative positioning system for ROVs operating in confined, cluttered underwater settings, achieved through the collaboration of an omnidirectional surface vehicle and an ROV. A formulation is proposed and evaluated in the simulation against ground truth. The experimental results from the simulation form a proof of principle of the proposed system and also demonstrate its deployability. Unlike many previous approaches, the system does not rely on fixed infrastructure or tracking of features in the environment and can cover large enclosed areas without additional equipment.
Virtual Elastic Tether: a New Approach for Multi-agent Navigation in Confined Aquatic Environments
Mar 15, 2024



Underwater navigation is a challenging area in the field of mobile robotics due to inherent constraints in self-localisation and communication in underwater environments. Some of these challenges can be mitigated by using collaborative multi-agent teams. However, when applied underwater, the robustness of traditional multi-agent collaborative control approaches is highly limited due to the unavailability of reliable measurements. In this paper, the concept of a Virtual Elastic Tether (VET) is introduced in the context of incomplete state measurements, which represents an innovative approach to underwater navigation in confined spaces. The concept of VET is formulated and validated using the Cooperative Aquatic Vehicle Exploration System (CAVES), which is a sim-to-real multi-agent aquatic robotic platform. Within this framework, a vision-based Autonomous Underwater Vehicle-Autonomous Surface Vehicle leader-follower formulation is developed. Experiments were conducted in both simulation and on a physical platform, benchmarked against a traditional Image-Based Visual Servoing approach. Results indicate that the formation of the baseline approach fails under discrete disturbances, when induced distances between the robots exceeds 0.6 m in simulation and 0.3 m in the real world. In contrast, the VET-enhanced system recovers to pre-perturbation distances within 5 seconds. Furthermore, results illustrate the successful navigation of VET-enhanced CAVES in a confined water pond where the baseline approach fails to perform adequately.
Millimeter-Wave Sensing for Avoidance of High-Risk Ground Conditions for Mobile Robots
Mar 30, 2022
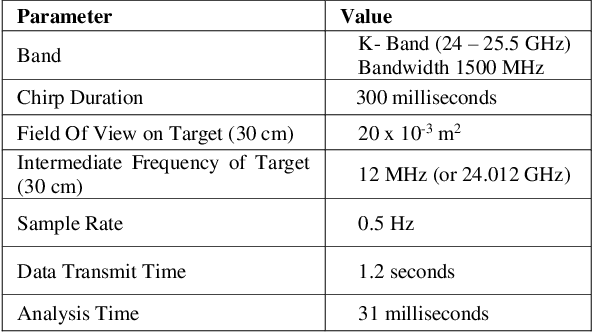
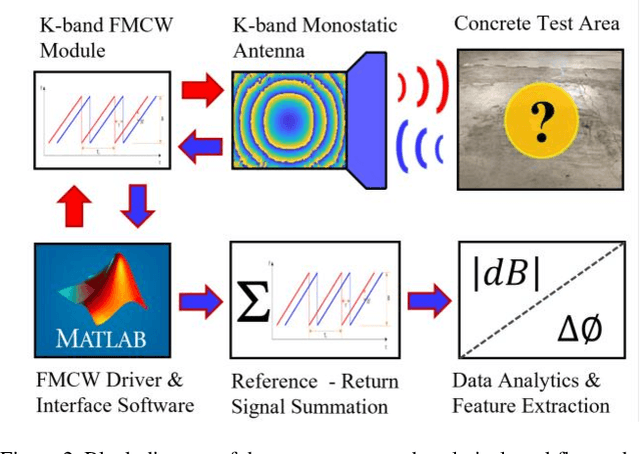
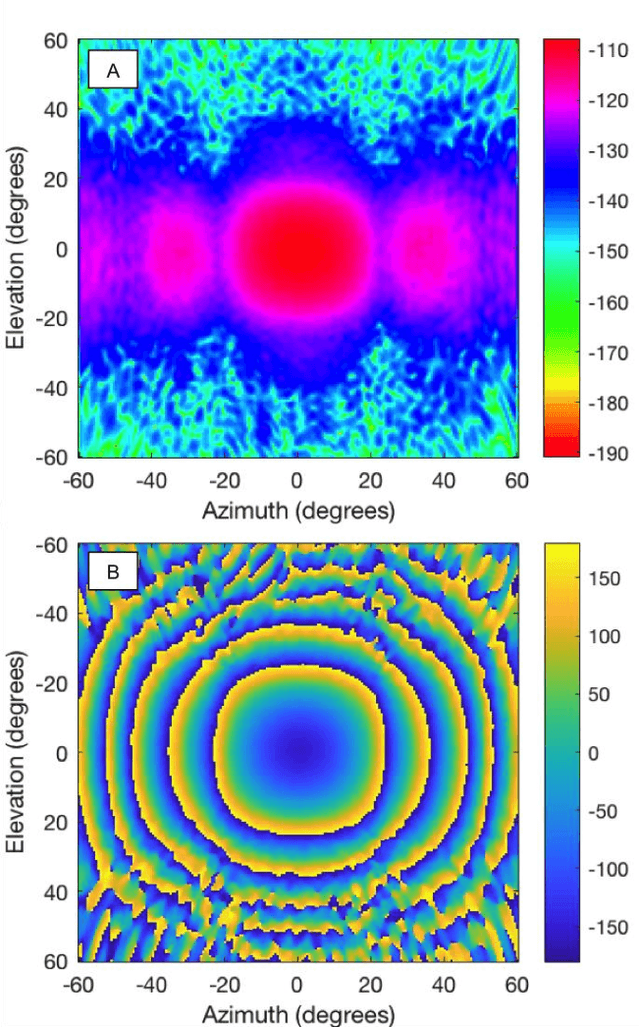
Mobile robot autonomy has made significant advances in recent years, with navigation algorithms well developed and used commercially in certain well-defined environments, such as warehouses. The common link in usage scenarios is that the environments in which the robots are utilized have a high degree of certainty. Operating environments are often designed to be robot friendly, for example augmented reality markers are strategically placed and the ground is typically smooth, level, and clear of debris. For robots to be useful in a wider range of environments, especially environments that are not sanitized for their use, robots must be able to handle uncertainty. This requires a robot to incorporate new sensors and sources of information, and to be able to use this information to make decisions regarding navigation and the overall mission. When using autonomous mobile robots in unstructured and poorly defined environments, such as a natural disaster site or in a rural environment, ground condition is of critical importance and is a common cause of failure. Examples include loss of traction due to high levels of ground water, hidden cavities, or material boundary failures. To evaluate a non-contact sensing method to mitigate these risks, Frequency Modulated Continuous Wave (FMCW) radar is integrated with an Unmanned Ground Vehicle (UGV), representing a novel application of FMCW to detect new measurands for Robotic Autonomous Systems (RAS) navigation, informing on terrain integrity and adding to the state-of-the-art in sensing for optimized autonomous path planning. In this paper, the FMCW is first evaluated in a desktop setting to determine its performance in anticipated ground conditions. The FMCW is then fixed to a UGV and the sensor system is tested and validated in a representative environment containing regions with significant levels of ground water saturation.
MIRRAX: A Reconfigurable Robot for Limited Access Environments
Mar 01, 2022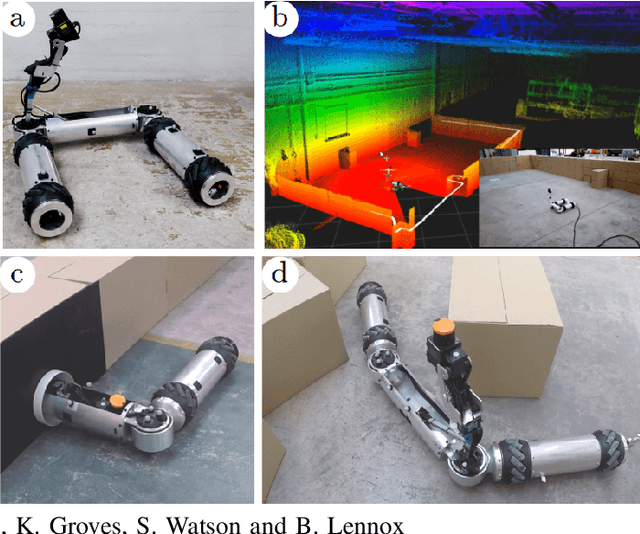

The development of mobile robot platforms for inspection has gained traction in recent years with the rapid advancement in hardware and software. However, conventional mobile robots are unable to address the challenge of operating in extreme environments where the robot is required to traverse narrow gaps in highly cluttered areas with restricted access. This paper presents MIRRAX, a robot that has been designed to meet these challenges with the capability of re-configuring itself to both access restricted environments through narrow ports and navigate through tightly spaced obstacles. Controllers for the robot are detailed, along with an analysis on the controllability of the robot given the use of Mecanum wheels in a variable configuration. Characterisation on the robot's performance identified suitable configurations for operating in narrow environments. The minimum lateral footprint width achievable for stable configuration ($<2^\text{o}$~roll) was 0.19~m. Experimental validation of the robot's controllability shows good agreement with the theoretical analysis. A further series of experiments shows the feasibility of the robot in addressing the challenges above: the capability to reconfigure itself for restricted entry through ports as small as 150mm diameter, and navigating through cluttered environments. The paper also presents results from a deployment in a Magnox facility at the Sellafield nuclear site in the UK -- the first robot to ever do so, for remote inspection and mapping.