 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Regression Codes for Integrated Passive Sensing and Communications
Nov 08, 2024



We propose a novel integrated sensing and communication (ISAC) system, where the base station (BS) passively senses the channel parameters using the information carrying signals from a user. To simultaneously guarantee decoding and sensing performance, the user adopts sparse regression codes (SPARCs) with cyclic redundancy check (CRC) to transmit its information bits. The BS generates an initial coarse channel estimation of the parameters after receiving the pilot signal. Then, a novel iterative decoding and parameter sensing algorithm is proposed, where the correctly decoded codewords indicated by the CRC bits are utilized to improve the sensing and channel estimation performance at the BS. In turn, the improved estimate of the channel parameters lead to a better decoding performance. Simulation results show the effectiveness of the proposed iterative decoding and sensing algorithm, where both the sensing and the communication performance are significantly improved with a few iterations. Extensive ablation studies concerning different channel estimation methods and number of CRC bits are carried out for a comprehensive evaluation of the proposed scheme.
Integrated Sensing and Communications in Clutter Environment
Nov 03, 2023



In this paper, we propose a practical integrated sensing and communications (ISAC) framework to sense dynamic targets from clutter environment while ensuring users communications quality. To implement communications function and sensing function simultaneously, we design multiple communications beams that can communicate with the users as well as one sensing beam that can rotate and scan the entire space. To minimize the interference of sensing beam on existing communications systems, we divide the service area into sensing beam for sensing (S4S) sector and communications beam for sensing (C4S) sector, and provide beamforming design and power allocation optimization strategies for each type sector. Unlike most existing ISAC studies that ignore the interference of static environmental clutter on target sensing, we construct a mixed sensing channel model that includes both static environment and dynamic targets. When base station receives the echo signals, the mean phasor cancellation (MPC) method is employed to filter out the interference from static environmental clutter and to extract the effective dynamic target echoes. Then a complete and practical dynamic target sensing scheme is designed to detect the presence of dynamic targets and to estimate their angles, distances, and velocities. In particular, dynamic target detection and angle estimation are realized through angle-Doppler spectrum estimation (ADSE) and joint detection over multiple subcarriers (MSJD), while distance and velocity estimation are realized through the extended subspace algorithm. Simulation results demonstrate the effectiveness of the proposed scheme and its superiority over the existing methods that ignore environmental clutter.
Moving Target Sensing for ISAC Systems in Clutter Environment
Nov 03, 2023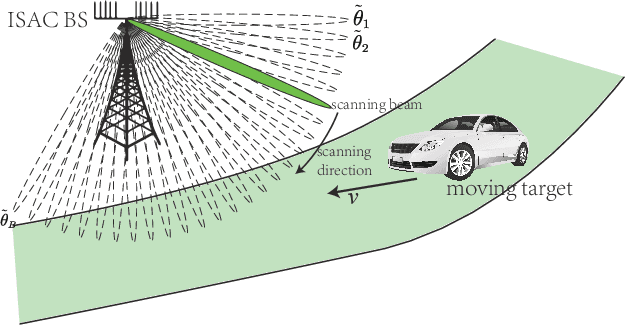
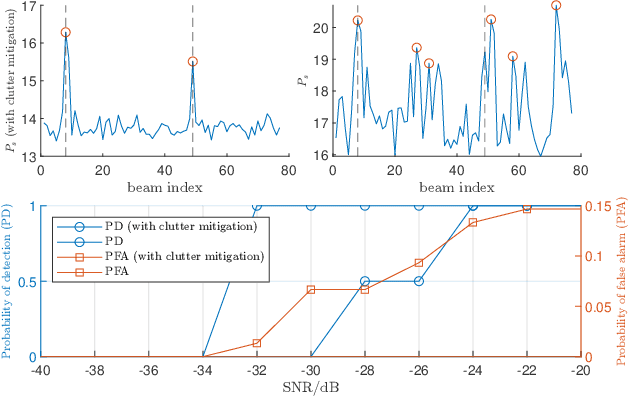
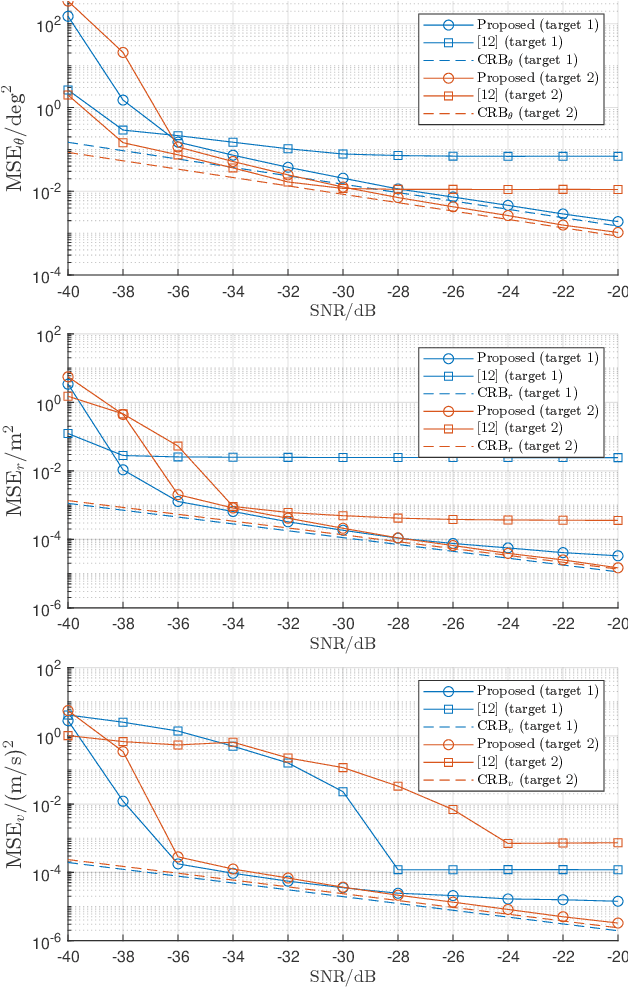
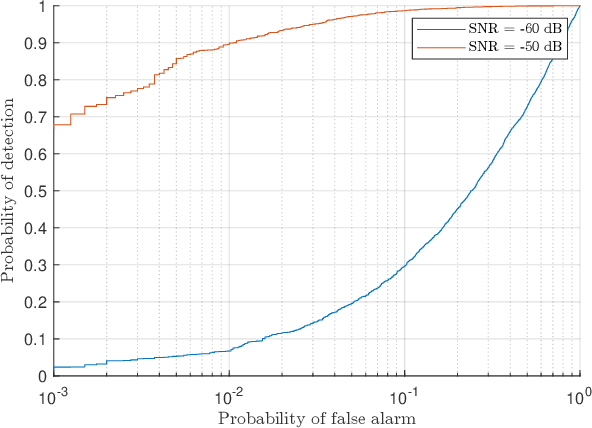
In this paper, we consider the moving target sensing problem for integrated sensing and communication (ISAC) systems in clutter environment. Scatterers produce strong clutter, deteriorating the performance of ISAC systems in practice. Given that scatterers are typically stationary and the targets of interest are usually moving, we here focus on sensing the moving targets. Specifically, we adopt a scanning beam to search for moving target candidates. For the received signal in each scan, we employ high-pass filtering in the Doppler domain to suppress the clutter within the echo, thereby identifying candidate moving targets according to the power of filtered signal. Then, we adopt root-MUSIC-based algorithms to estimate the angle, range, and radial velocity of these candidate moving targets. Subsequently, we propose a target detection algorithm to reject false targets. Simulation results validate the effectiveness of these proposed methods.
Variations on a Theme by Blahut and Arimoto
May 04, 2023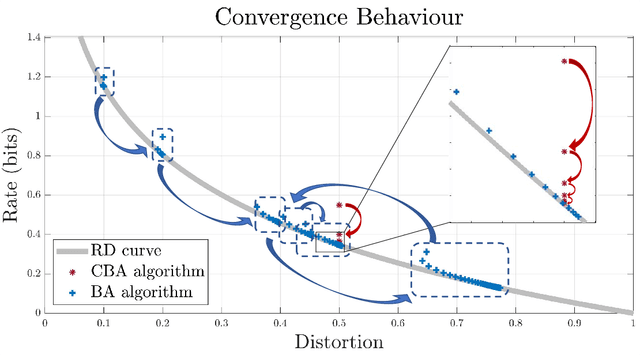
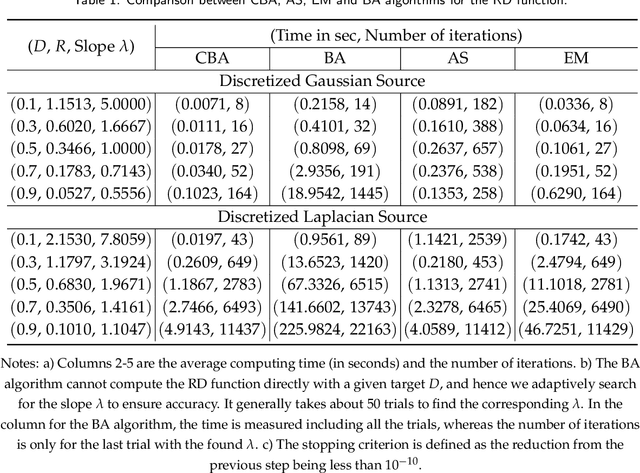
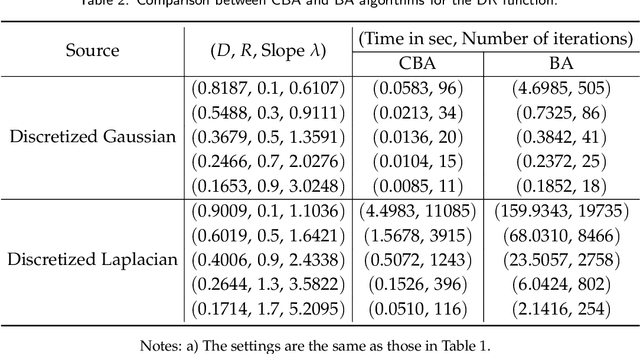
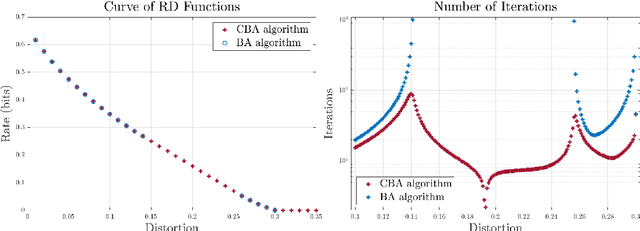
The Blahut-Arimoto (BA) algorithm has played a fundamental role in the numerical computation of rate-distortion (RD) functions. This algorithm possesses a desirable monotonic convergence property by alternatively minimizing its Lagrangian with a fixed multiplier. In this paper, we propose a novel modification of the BA algorithm, letting the multiplier be updated in each iteration via a one-dimensional root-finding step with respect to a monotonic univariate function, which can be efficiently implemented by Newton's method. This allows the multiplier to be updated in a flexible and efficient manner, overcoming a major drawback of the original BA algorithm wherein the multiplier is fixed throughout iterations. Consequently, the modified algorithm is capable of directly computing the RD function for a given target distortion, without exploring the entire RD curve as in the original BA algorithm. A theoretical analysis shows that the modified algorithm still converges to the RD function and the convergence rate is $\Theta(1/n)$, where $n$ denotes the number of iterations. Numerical experiments demonstrate that the modified algorithm directly computes the RD function with a given target distortion, and it significantly accelerates the original BA algorithm.
Research on Data Fusion Algorithm Based on Deep Learning in Target Tracking
Nov 23, 2022



Aiming at the limitation that deep long and short-term memory network(DLSTM) algorithm cannot perform parallel computing and cannot obtain global information, in this paper, feature extraction and feature processing are firstly carried out according to the characteristics of eye movement data and tracking data, then by introducing a convolutional neural network (CNN) into a deep long and short-term memory network, developed a new network structure and designed a fusion strategy, an eye tracking data fusion algorithm based on long and short-term memory network is proposed. The experimental results show that compared with the two fusion algorithms based on deep learning, the algorithm proposed in this paper performs well in terms of fusion quality.