 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-Powered Fully Automated Chaos Engineering: Towards Enabling Anyone to Build Resilient Software Systems at Low Cost
Nov 11, 2025Chaos Engineering (CE) is an engineering technique aimed at improving the resilience of distributed systems. It involves intentionally injecting faults into a system to test its resilience, uncover weaknesses, and address them before they cause failures in production. Recent CE tools automate the execution of predefined CE experiments. However, planning such experiments and improving the system based on the experimental results still remain manual. These processes are labor-intensive and require multi-domain expertise. To address these challenges and enable anyone to build resilient systems at low cost, this paper proposes ChaosEater, a system that automates the entire CE cycle with Large Language Models (LLMs). It predefines an agentic workflow according to a systematic CE cycle and assigns subdivided processes within the workflow to LLMs. ChaosEater targets CE for software systems built on Kubernetes. Therefore, the LLMs in ChaosEater complete CE cycles through software engineering tasks, including requirement definition, code generation, testing, and debugging. We evaluate ChaosEater through case studies on small- and large-scale Kubernetes systems. The results demonstrate that it consistently completes reasonable CE cycles with significantly low time and monetary costs. Its cycles are also qualitatively validated by human engineers and LLMs.
ChaosEater: Fully Automating Chaos Engineering with Large Language Models
Jan 19, 2025



Chaos Engineering (CE) is an engineering technique aimed at improving the resiliency of distributed systems. It involves artificially injecting specific failures into a distributed system and observing its behavior in response. Based on the observation, the system can be proactively improved to handle those failures. Recent CE tools realize the automated execution of predefined CE experiments. However, defining these experiments and reconfiguring the system after the experiments still remain manual. To reduce the costs of the manual operations, we propose \textsc{ChaosEater}, a \textit{system} for automating the entire CE operations with Large Language Models (LLMs). It pre-defines the general flow according to the systematic CE cycle and assigns subdivided operations within the flow to LLMs. We assume systems based on Infrastructure as Code (IaC), wherein the system configurations and artificial failures are managed through code. Hence, the LLMs' operations in our \textit{system} correspond to software engineering tasks, including requirement definition, code generation and debugging, and testing. We validate our \textit{system} through case studies on both small and large systems. The results demonstrate that our \textit{system} significantly reduces both time and monetary costs while completing reasonable single CE cycles.
Electric Vehicle Routing Problem for Emergency Power Supply: Towards Telecom Base Station Relief
Apr 08, 2024



As a telecom provider, our company has a critical mission to maintain telecom services even during power outages. To accomplish the mission, it is essential to maintain the power of the telecom base stations. Here we consider a solution where electric vehicles (EVs) directly supply power to base stations by traveling to their locations. The goal is to find EV routes that minimize both the total travel distance of all EVs and the number of downed base stations. In this paper, we formulate this routing problem as a new variant of the Electric Vehicle Routing Problem (EVRP) and propose a solver that combines a rule-based vehicle selector and a reinforcement learning (RL)-based node selector. The rule of the vehicle selector ensures the exact environmental states when the selected EV starts to move. In addition, the node selection by the RL model enables fast route generation, which is critical in emergencies. We evaluate our solver on both synthetic datasets and real datasets. The results show that our solver outperforms baselines in terms of the objective value and computation time. Moreover, we analyze the generalization and scalability of our solver, demonstrating the capability toward unseen settings and large-scale problems. Check also our project page: https://ntt-dkiku.github.io/rl-evrpeps.
RouteExplainer: An Explanation Framework for Vehicle Routing Problem
Mar 06, 2024



The Vehicle Routing Problem (VRP) is a widely studied combinatorial optimization problem and has been applied to various practical problems. While the explainability for VRP is significant for improving the reliability and interactivity in practical VRP applications, it remains unexplored. In this paper, we propose RouteExplainer, a post-hoc explanation framework that explains the influence of each edge in a generated route. Our framework realizes this by rethinking a route as the sequence of actions and extending counterfactual explanations based on the action influence model to VRP. To enhance the explanation, we additionally propose an edge classifier that infers the intentions of each edge, a loss function to train the edge classifier, and explanation-text generation by Large Language Models (LLMs). We quantitatively evaluate our edge classifier on four different VRPs. The results demonstrate its rapid computation while maintaining reasonable accuracy, thereby highlighting its potential for deployment in practical applications. Moreover, on the subject of a tourist route, we qualitatively evaluate explanations generated by our framework. This evaluation not only validates our framework but also shows the synergy between explanation frameworks and LLMs. See https://ntt-dkiku.github.io/xai-vrp for our code, datasets, models, and demo.
Single-Fingered Reconfigurable Robotic Gripper With a Folding Mechanism for Narrow Working Spaces
Nov 22, 2022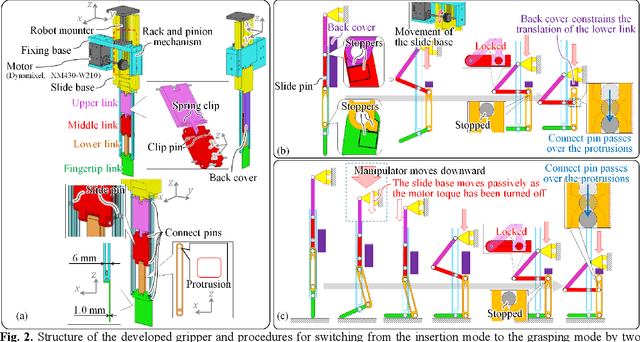
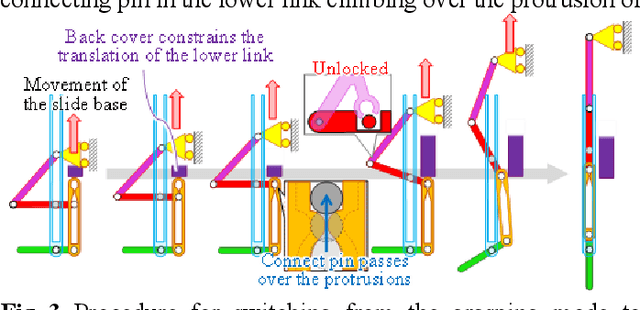
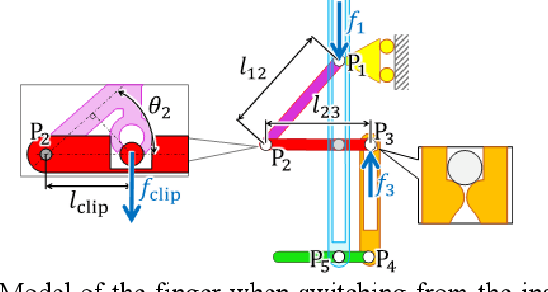
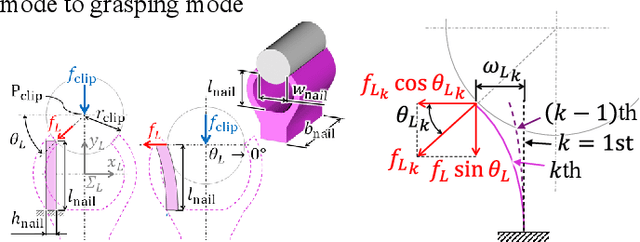
This letter proposes a novel single-fingered reconfigurable robotic gripper for grasping objects in narrow working spaces. The finger of the developed gripper realizes two configurations, namely, the insertion and grasping modes, using only a single motor. In the insertion mode, the finger assumes a thin shape such that it can insert its tip into a narrow space. The grasping mode of the finger is activated through a folding mechanism. Mode switching can be achieved in two ways: switching the mode actively by a motor, or combining passive rotation of the fingertip through contact with the support surface and active motorized construction of the claw. The latter approach is effective when it is unclear how much finger insertion is required for a specific task. The structure provides a simple control scheme. The performance of the proposed robotic gripper design and control methodology was experimentally evaluated. The minimum width of the insertion space required to grasp an object is 4 mm (1 mm, when using a strategy).
* This study was presented at IROS 2022
Recovery command generation towards automatic recovery in ICT systems by Seq2Seq learning
Mar 24, 2020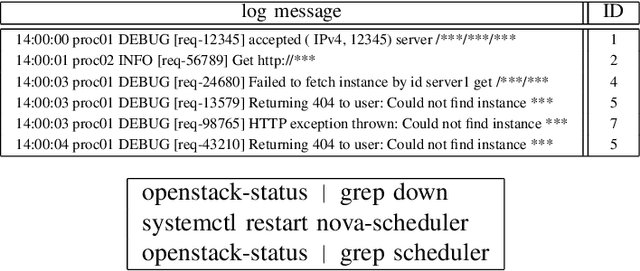

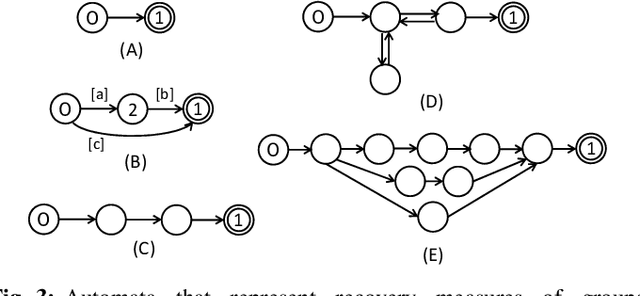
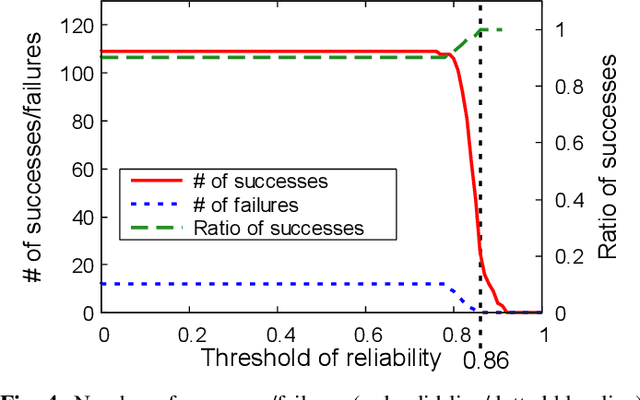
With the increase in scale and complexity of ICT systems, their operation increasingly requires automatic recovery from failures. Although it has become possible to automatically detect anomalies and analyze root causes of failures with current methods, making decisions on what commands should be executed to recover from failures still depends on manual operation, which is quite time-consuming. Toward automatic recovery, we propose a method of estimating recovery commands by using Seq2Seq, a neural network model. This model learns complex relationships between logs obtained from equipment and recovery commands that operators executed in the past. When a new failure occurs, our method estimates plausible commands that recover from the failure on the basis of collected logs. We conducted experiments using a synthetic dataset and realistic OpenStack dataset, demonstrating that our method can estimate recovery commands with high accuracy.