 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-payload and self-adaptive robotic hand with 1-degree-of-freedom translation/rotation switching mechanism
Mar 08, 2023This study proposes a novel robotic hand that can achieve self-adaptive grasping and a large payload (over 20 kg) with a single actuator. Accordingly, two novel mechanisms, an actuation system with self-motion switching and a self-adaptive finger with a self-locking mechanism, are installed in a 1-degree-of-freedom robotic hand. The actuation system switches the output motion from translational to rotational according to the applied external load. The finger is bent by inserting a flexible shaft inside it. Its bending posture can conform to the shape of the object owing to the flexible shaft, and the posture is fixed by a self-locking mechanism, which can be released by the rotational motion of the actuation system. This study presents a mechanical analysis of these mechanisms to achieve the desired behavior. The analysis was validated experimentally, and a robotic hand with these mechanisms were evaluated using grasping tests.
Single-Fingered Reconfigurable Robotic Gripper With a Folding Mechanism for Narrow Working Spaces
Nov 22, 2022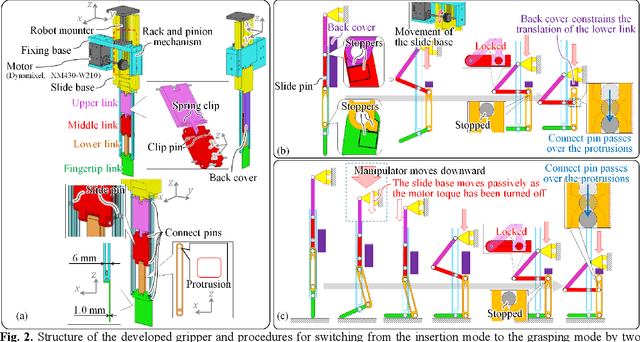
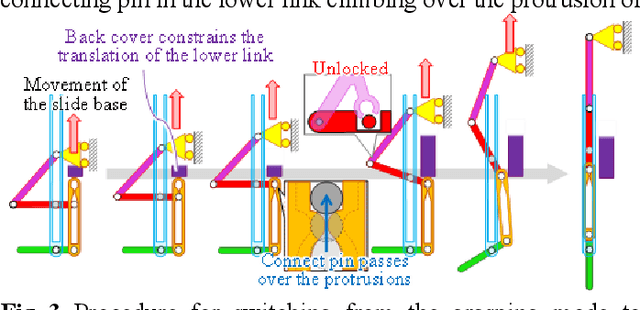
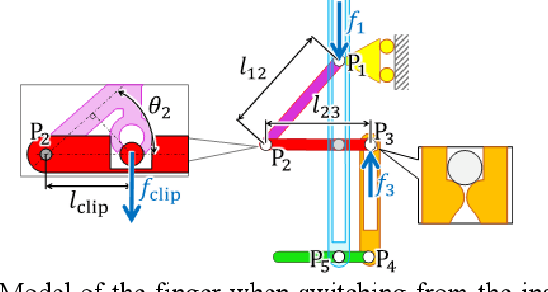
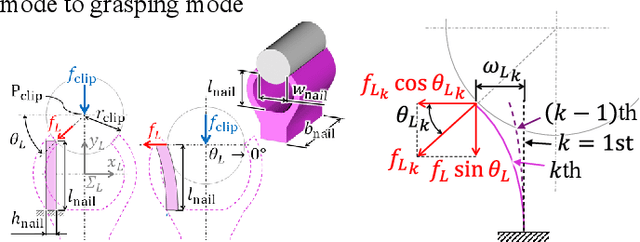
This letter proposes a novel single-fingered reconfigurable robotic gripper for grasping objects in narrow working spaces. The finger of the developed gripper realizes two configurations, namely, the insertion and grasping modes, using only a single motor. In the insertion mode, the finger assumes a thin shape such that it can insert its tip into a narrow space. The grasping mode of the finger is activated through a folding mechanism. Mode switching can be achieved in two ways: switching the mode actively by a motor, or combining passive rotation of the fingertip through contact with the support surface and active motorized construction of the claw. The latter approach is effective when it is unclear how much finger insertion is required for a specific task. The structure provides a simple control scheme. The performance of the proposed robotic gripper design and control methodology was experimentally evaluated. The minimum width of the insertion space required to grasp an object is 4 mm (1 mm, when using a strategy).
* This study was presented at IROS 2022