 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecovery command generation towards automatic recovery in ICT systems by Seq2Seq learning
Mar 24, 2020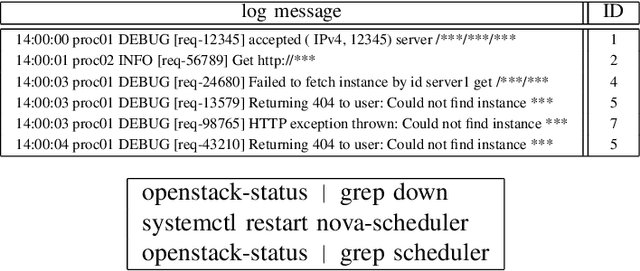

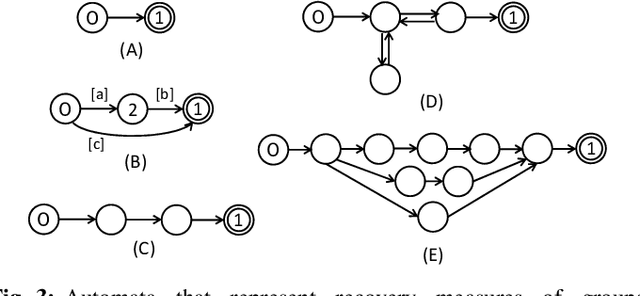
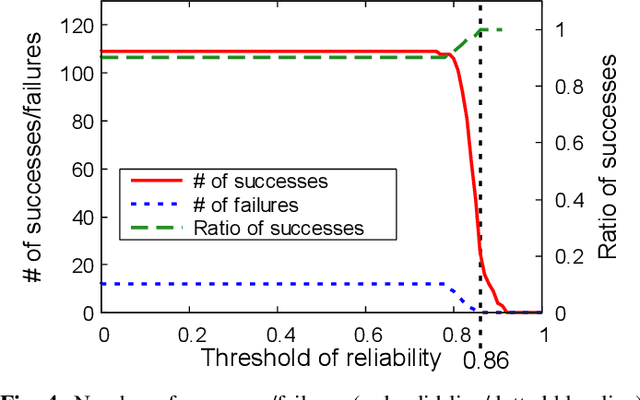
With the increase in scale and complexity of ICT systems, their operation increasingly requires automatic recovery from failures. Although it has become possible to automatically detect anomalies and analyze root causes of failures with current methods, making decisions on what commands should be executed to recover from failures still depends on manual operation, which is quite time-consuming. Toward automatic recovery, we propose a method of estimating recovery commands by using Seq2Seq, a neural network model. This model learns complex relationships between logs obtained from equipment and recovery commands that operators executed in the past. When a new failure occurs, our method estimates plausible commands that recover from the failure on the basis of collected logs. We conducted experiments using a synthetic dataset and realistic OpenStack dataset, demonstrating that our method can estimate recovery commands with high accuracy.
DeepSIP: A System for Predicting Service Impact of Network Failure by Temporal Multimodal CNN
Mar 24, 2020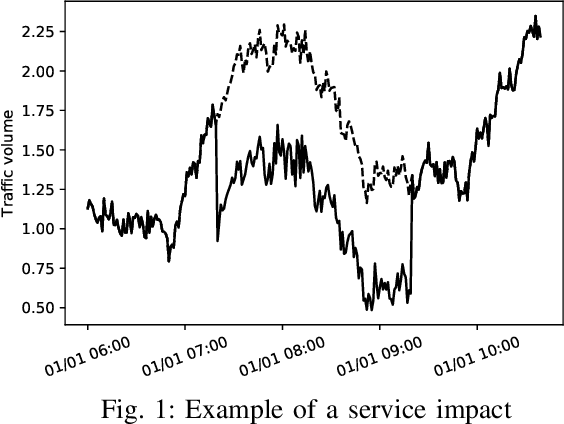
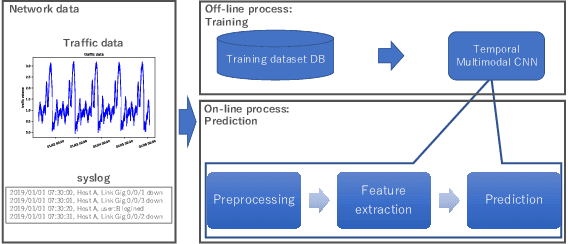
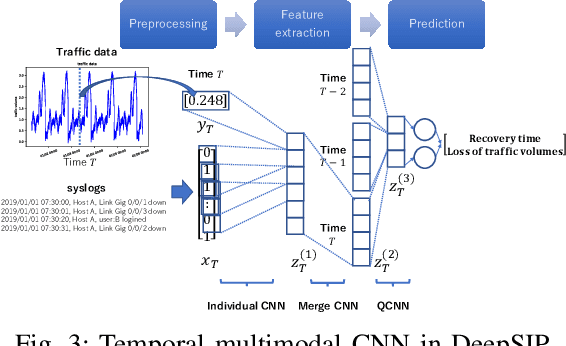
When a failure occurs in a network, network operators need to recognize service impact, since service impact is essential information for handling failures. In this paper, we propose Deep learning based Service Impact Prediction (DeepSIP), a system to predict the time to recovery from the failure and the loss of traffic volume due to the failure in a network element using a temporal multimodal convolutional neural network (CNN). Since the time to recovery is useful information for a service level agreement (SLA) and the loss of traffic volume is directly related to the severity of the failures, we regard these as the service impact. The service impact is challenging to predict, since a network element does not explicitly contain any information about the service impact. Thus, we aim to predict the service impact from syslog messages and traffic volume by extracting hidden information about failures. To extract useful features for prediction from syslog messages and traffic volume which are multimodal and strongly correlated, and have temporal dependencies, we use temporal multimodal CNN. We experimentally evaluated DeepSIP and DeepSIP reduced prediction error by approximately 50% in comparison with other NN-based methods with a synthetic dataset.
Krylov Subspace Method for Nonlinear Dynamical Systems with Random Noise
Sep 10, 2019
Operator-theoretic analysis of nonlinear dynamical systems has attracted much attention in a variety of engineering and scientific fields, endowed with practical estimation methods using data such as dynamic mode decomposition. In this paper, we address a lifted representation of nonlinear dynamical systems with random noise based on transfer operators, and develop a novel Krylov subspace method for estimating it using finite data, with consideration of the unboundedness of operators. For this purpose, we first consider Perron-Frobenius operators with kernel-mean embeddings for such systems. Then, we extend the Arnoldi method, which is the most classical type of Kryov subspace methods, so that it can be applied to the current case. Meanwhile, the Arnoldi method requires the assumption that the operator is bounded, which is not necessarily satisfied for transfer operators on nonlinear systems. We accordingly develop the shift-invert Arnoldi method for the Perron-Frobenius operators to avoid this problem. Also, we describe a way of evaluating the predictive accuracy by estimated operators on the basis of the maximum mean discrepancy, which is applicable, for example, to anomaly detection in complex systems. The empirical performance of our methods is investigated using synthetic and real-world healthcare data.