 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePierGuard: A Planning Framework for Underwater Robotic Inspection of Coastal Piers
May 07, 2025Using underwater robots instead of humans for the inspection of coastal piers can enhance efficiency while reducing risks. A key challenge in performing these tasks lies in achieving efficient and rapid path planning within complex environments. Sampling-based path planning methods, such as Rapidly-exploring Random Tree* (RRT*), have demonstrated notable performance in high-dimensional spaces. In recent years, researchers have begun designing various geometry-inspired heuristics and neural network-driven heuristics to further enhance the effectiveness of RRT*. However, the performance of these general path planning methods still requires improvement when applied to highly cluttered underwater environments. In this paper, we propose PierGuard, which combines the strengths of bidirectional search and neural network-driven heuristic regions. We design a specialized neural network to generate high-quality heuristic regions in cluttered maps, thereby improving the performance of the path planning. Through extensive simulation and real-world ocean field experiments, we demonstrate the effectiveness and efficiency of our proposed method compared with previous research. Our method achieves approximately 2.6 times the performance of the state-of-the-art geometric-based sampling method and nearly 4.9 times that of the state-of-the-art learning-based sampling method. Our results provide valuable insights for the automation of pier inspection and the enhancement of maritime safety. The updated experimental video is available in the supplementary materials.
Coastal Underwater Evidence Search System with Surface-Underwater Collaboration
Oct 03, 2024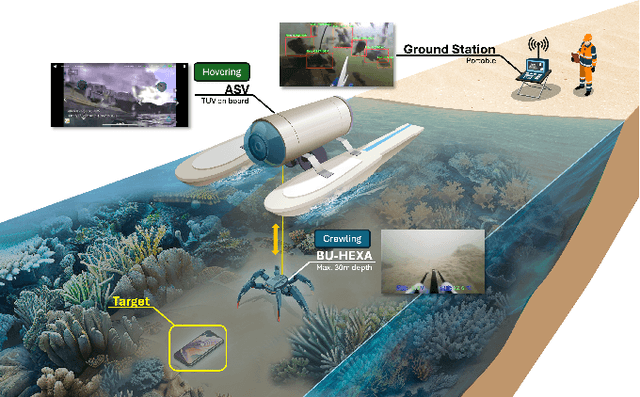

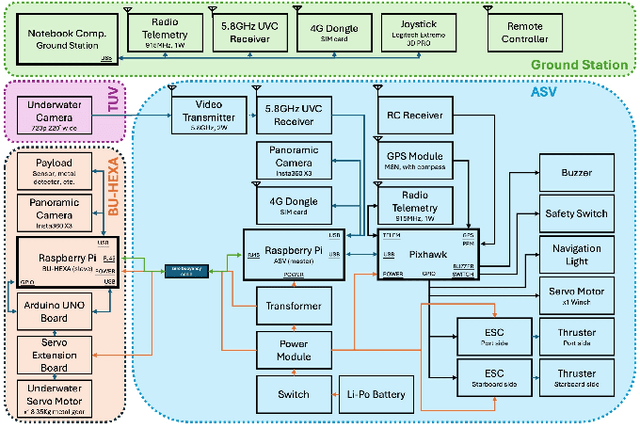
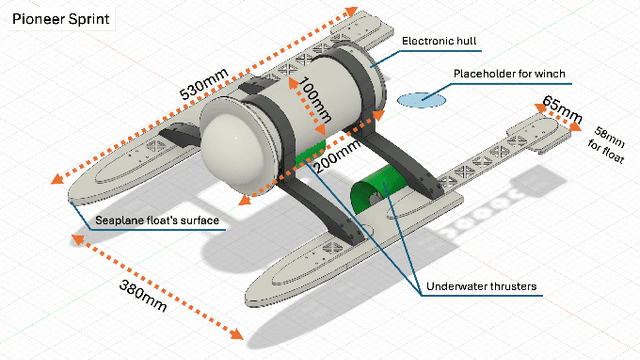
The Coastal underwater evidence search system with surface-underwater collaboration is designed to revolutionize the search for artificial objects in coastal underwater environments, overcoming limitations associated with traditional methods such as divers and tethered remotely operated vehicles. Our innovative multi-robot collaborative system consists of three parts, an autonomous surface vehicle as a mission control center, a towed underwater vehicle for wide-area search, and a biomimetic underwater robot inspired by marine organisms for detailed inspections of identified areas. We conduct extensive simulations and real-world experiments in pond environments and coastal fields to demonstrate the system potential to surpass the limitations of conventional underwater search methods, offering a robust and efficient solution for law enforcement and recovery operations in marine settings.
MINER-RRT*: A Hierarchical and Fast Trajectory Planning Framework in 3D Cluttered Environments
Jun 02, 2024



Trajectory planning for quadrotors in cluttered environments has been challenging in recent years. While many trajectory planning frameworks have been successful, there still exists potential for improvements, particularly in enhancing the speed of generating efficient trajectories. In this paper, we present a novel hierarchical trajectory planning framework to reduce computational time and memory usage called MINER-RRT*, which consists of two main components. First, we propose a sampling-based path planning method boosted by neural networks, where the predicted heuristic region accelerates the convergence of rapidly-exploring random trees. Second, we utilize the optimal conditions derived from the quadrotor's differential flatness properties to construct polynomial trajectories that minimize control effort in multiple stages. Extensive simulation and real-world experimental results demonstrate that, compared to several state-of-the-art (SOTA) approaches, our method can generate high-quality trajectories with better performance in 3D cluttered environments.