 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoastal Underwater Evidence Search System with Surface-Underwater Collaboration
Paper and Code
Oct 03, 2024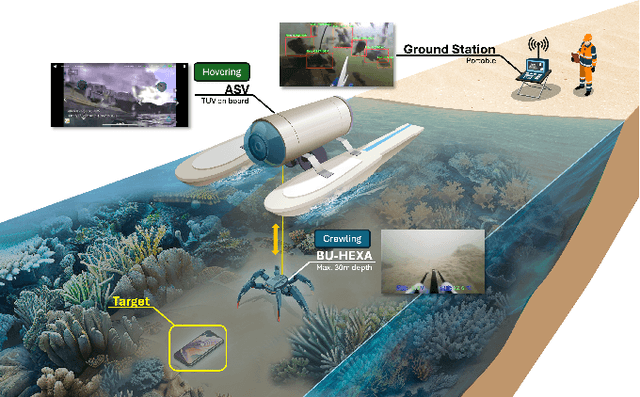

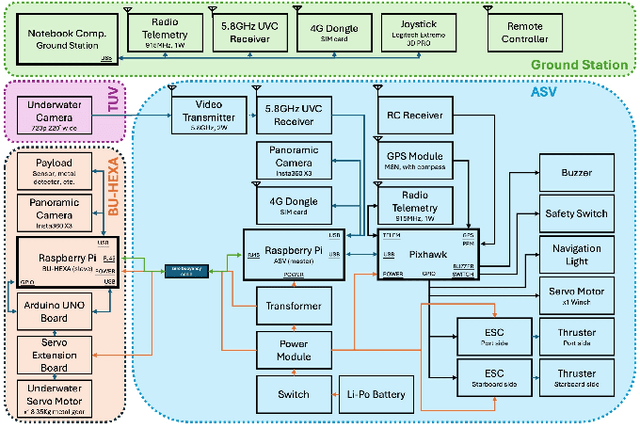
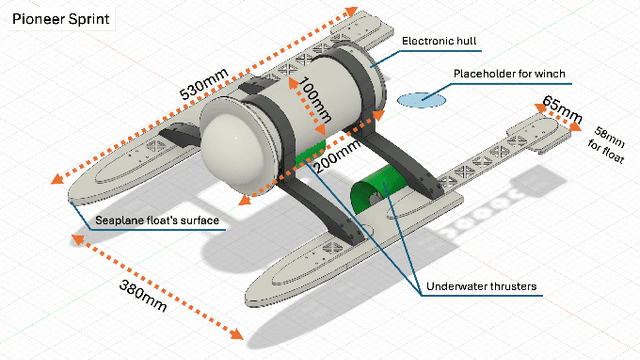
The Coastal underwater evidence search system with surface-underwater collaboration is designed to revolutionize the search for artificial objects in coastal underwater environments, overcoming limitations associated with traditional methods such as divers and tethered remotely operated vehicles. Our innovative multi-robot collaborative system consists of three parts, an autonomous surface vehicle as a mission control center, a towed underwater vehicle for wide-area search, and a biomimetic underwater robot inspired by marine organisms for detailed inspections of identified areas. We conduct extensive simulations and real-world experiments in pond environments and coastal fields to demonstrate the system potential to surpass the limitations of conventional underwater search methods, offering a robust and efficient solution for law enforcement and recovery operations in marine settings.