 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDexArt: Benchmarking Generalizable Dexterous Manipulation with Articulated Objects
May 09, 2023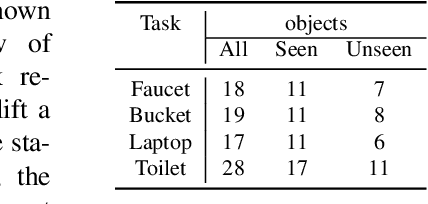



To enable general-purpose robots, we will require the robot to operate daily articulated objects as humans do. Current robot manipulation has heavily relied on using a parallel gripper, which restricts the robot to a limited set of objects. On the other hand, operating with a multi-finger robot hand will allow better approximation to human behavior and enable the robot to operate on diverse articulated objects. To this end, we propose a new benchmark called DexArt, which involves Dexterous manipulation with Articulated objects in a physical simulator. In our benchmark, we define multiple complex manipulation tasks, and the robot hand will need to manipulate diverse articulated objects within each task. Our main focus is to evaluate the generalizability of the learned policy on unseen articulated objects. This is very challenging given the high degrees of freedom of both hands and objects. We use Reinforcement Learning with 3D representation learning to achieve generalization. Through extensive studies, we provide new insights into how 3D representation learning affects decision making in RL with 3D point cloud inputs. More details can be found at https://www.chenbao.tech/dexart/.
GAPartNet: Cross-Category Domain-Generalizable Object Perception and Manipulation via Generalizable and Actionable Parts
Nov 10, 2022



Perceiving and manipulating objects in a generalizable way has been actively studied by the computer vision and robotics communities, where cross-category generalizable manipulation skills are highly desired yet underexplored. In this work, we propose to learn such generalizable perception and manipulation via Generalizable and Actionable Parts (GAParts). By identifying and defining 9 GAPart classes (e.g. buttons, handles, etc), we show that our part-centric approach allows our method to learn object perception and manipulation skills from seen object categories and directly generalize to unseen categories. Following the GAPart definition, we construct a large-scale part-centric interactive dataset, GAPartNet, where rich, part-level annotations (semantics, poses) are provided for 1166 objects and 8489 part instances. Based on GAPartNet, we investigate three cross-category tasks: part segmentation, part pose estimation, and part-based object manipulation. Given the large domain gaps between seen and unseen object categories, we propose a strong 3D segmentation method from the perspective of domain generalization by integrating adversarial learning techniques. Our method outperforms all existing methods by a large margin, no matter on seen or unseen categories. Furthermore, with part segmentation and pose estimation results, we leverage the GAPart pose definition to design part-based manipulation heuristics that can generalize well to unseen object categories in both simulation and real world. The dataset and code will be released.