 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyDRA: Hybrid Domain-Aware Robust Architecture for Heterogeneous Collaborative Perception
Mar 25, 2026In collaborative perception, an agent's performance can be degraded by heterogeneity arising from differences in model architecture or training data distributions. To address this challenge, we propose HyDRA (Hybrid Domain-Aware Robust Architecture), a unified pipeline that integrates intermediate and late fusion within a domain-aware framework. We introduce a lightweight domain classifier that dynamically identifies heterogeneous agents and assigns them to the late-fusion branch. Furthermore, we propose anchor-guided pose graph optimization to mitigate localization errors inherent in late fusion, leveraging reliable detections from intermediate fusion as fixed spatial anchors. Extensive experiments demonstrate that, despite requiring no additional training, HyDRA achieves performance comparable to state-of-the-art heterogeneity-aware CP methods. Importantly, this performance is maintained as the number of collaborating agents increases, enabling zero-cost scaling without retraining.
High-Density Automated Valet Parking with Relocation-Free Sequential Operations
Mar 25, 2026In this paper, we present DROP, high-Density Relocation-free sequential OPerations in automated valet parking. DROP addresses the challenges in high-density parking & vehicle retrieval without relocations. Each challenge is handled by jointly providing area-efficient layouts and relocation-free parking & exit sequences, considering accessibility with relocation-free sequential operations. To generate such sequences, relocation-free constraints are formulated as explicit logical conditions expressed in boolean variables. Recursive search strategies are employed to derive the logical conditions and enumerate relocation-free sequences under sequential constraints. We demonstrate the effectiveness of our framework through extensive simulations, showing its potential to significantly improve area utilization with relocation-free constraints. We also examine its viability on an application problem with prescribed operational order. The results from all experiments are available at: https://drop-park.github.io.
Miniature Testbed for Validating Multi-Agent Cooperative Autonomous Driving
Nov 14, 2025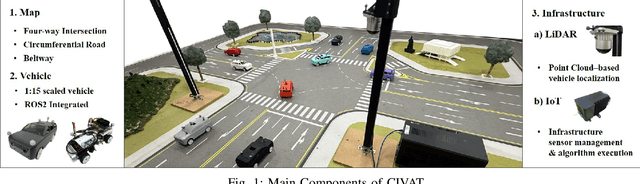
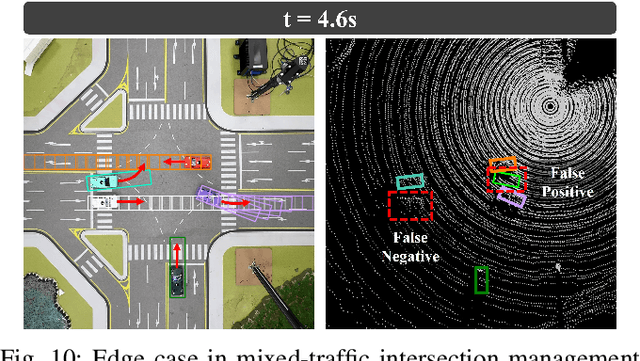
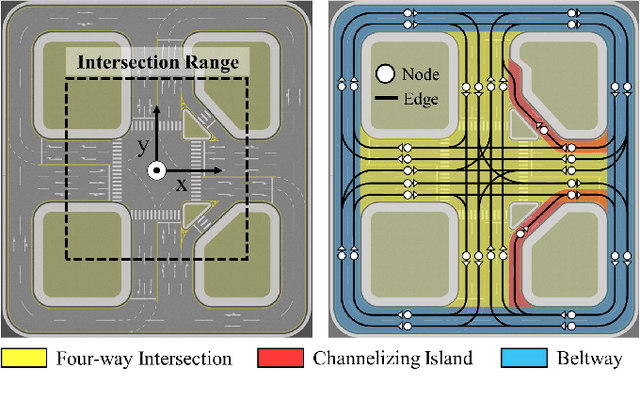
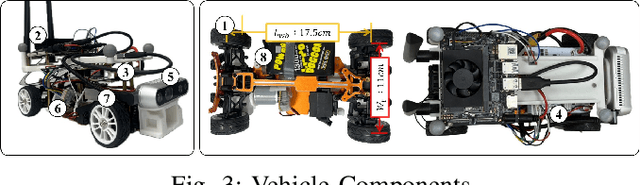
Cooperative autonomous driving, which extends vehicle autonomy by enabling real-time collaboration between vehicles and smart roadside infrastructure, remains a challenging yet essential problem. However, none of the existing testbeds employ smart infrastructure equipped with sensing, edge computing, and communication capabilities. To address this gap, we design and implement a 1:15-scale miniature testbed, CIVAT, for validating cooperative autonomous driving, consisting of a scaled urban map, autonomous vehicles with onboard sensors, and smart infrastructure. The proposed testbed integrates V2V and V2I communication with the publish-subscribe pattern through a shared Wi-Fi and ROS2 framework, enabling information exchange between vehicles and infrastructure to realize cooperative driving functionality. As a case study, we validate the system through infrastructure-based perception and intersection management experiments.
A Domain-Agnostic Scalable AI Safety Ensuring Framework
Apr 30, 2025



Ensuring the safety of AI systems has recently emerged as a critical priority for real-world deployment, particularly in physical AI applications. Current approaches to AI safety typically address predefined domain-specific safety conditions, limiting their ability to generalize across contexts. We propose a novel AI safety framework that ensures AI systems comply with any user-defined constraint, with any desired probability, and across various domains. In this framework, we combine an AI component (e.g., neural network) with an optimization problem to produce responses that minimize objectives while satisfying user-defined constraints with probabilities exceeding user-defined thresholds. For credibility assessment of the AI component, we propose internal test data, a supplementary set of safety-labeled data, and a conservative testing methodology that provides statistical validity of using internal test data. We also present an approximation method of a loss function and how to compute its gradient for training. We mathematically prove that probabilistic constraint satisfaction is guaranteed under specific, mild conditions and prove a scaling law between safety and the number of internal test data. We demonstrate our framework's effectiveness through experiments in diverse domains: demand prediction for production decision, safe reinforcement learning within the SafetyGym simulator, and guarding AI chatbot outputs. Through these experiments, we demonstrate that our method guarantees safety for user-specified constraints, outperforms for up to several order of magnitudes existing methods in low safety threshold regions, and scales effectively with respect to the size of internal test data.
Chance-Constrained Trajectory Planning with Multimodal Environmental Uncertainty
Mar 09, 2025We tackle safe trajectory planning under Gaussian mixture model (GMM) uncertainty. Specifically, we use a GMM to model the multimodal behaviors of obstacles' uncertain states. Then, we develop a mixed-integer conic approximation to the chance-constrained trajectory planning problem with deterministic linear systems and polyhedral obstacles. When the GMM moments are estimated via finite samples, we develop a tight concentration bound to ensure the chance constraint with a desired confidence. Moreover, to limit the amount of constraint violation, we develop a Conditional Value-at-Risk (CVaR) approach corresponding to the chance constraints and derive a tractable approximation for known and estimated GMM moments. We verify our methods with state-of-the-art trajectory prediction algorithms and autonomous driving datasets.
* Published in IEEE Control Systems Letters
Rethinking the Role of Infrastructure in Collaborative Perception
Oct 15, 2024Collaborative Perception (CP) is a process in which an ego agent receives and fuses sensor information from surrounding vehicles and infrastructure to enhance its perception capability. To evaluate the need for infrastructure equipped with sensors, extensive and quantitative analysis of the role of infrastructure data in CP is crucial, yet remains underexplored. To address this gap, we first quantitatively assess the importance of infrastructure data in existing vehicle-centric CP, where the ego agent is a vehicle. Furthermore, we compare vehicle-centric CP with infra-centric CP, where the ego agent is now the infrastructure, to evaluate the effectiveness of each approach. Our results demonstrate that incorporating infrastructure data improves 3D detection accuracy by up to 10.87%, and infra-centric CP shows enhanced noise robustness and increases accuracy by up to 42.53% compared with vehicle-centric CP.
A GPT-based Decision Transformer for Multi-Vehicle Coordination at Unsignalized Intersections
Oct 08, 2024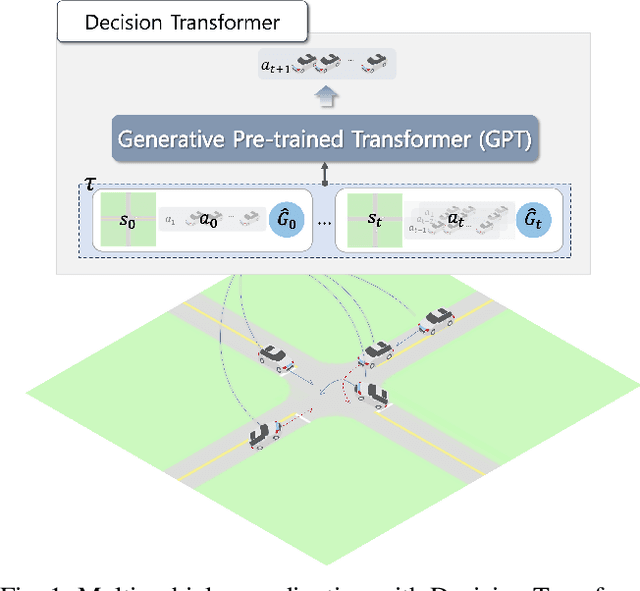
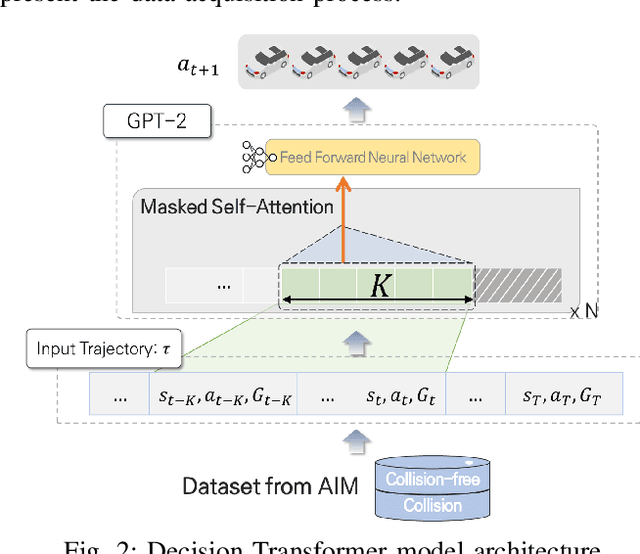
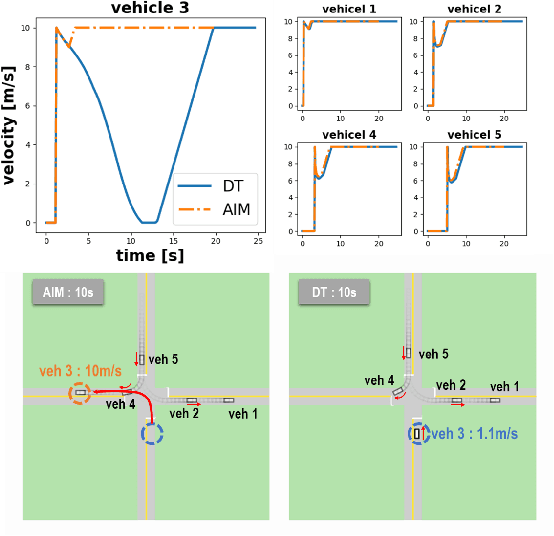
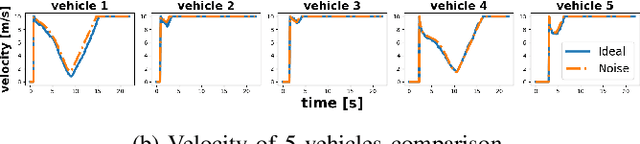
In this paper, we explore the application of the Decision Transformer, a decision-making algorithm based on the Generative Pre-trained Transformer (GPT) architecture, to multi-vehicle coordination at unsignalized intersections. We formulate the coordination problem so as to find the optimal trajectories for multiple vehicles at intersections, modeling it as a sequence prediction task to fully leverage the power of GPTs as a sequence model. Through extensive experiments, we compare our approach to a reservation-based intersection management system. Our results show that the Decision Transformer can outperform the training data in terms of total travel time and can be generalized effectively to various scenarios, including noise-induced velocity variations, continuous interaction environments, and different vehicle numbers and road configurations.
V2X-M2C: Efficient Multi-Module Collaborative Perception with Two Connections
Jul 16, 2024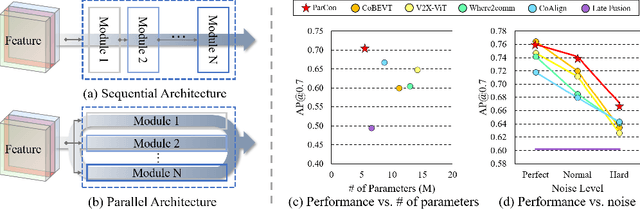
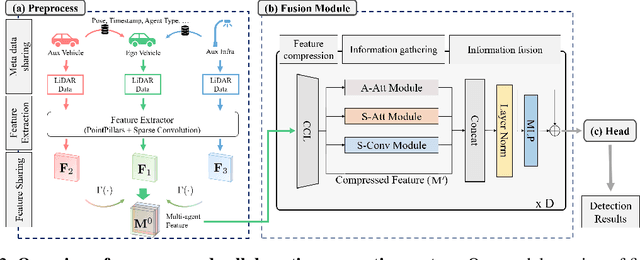
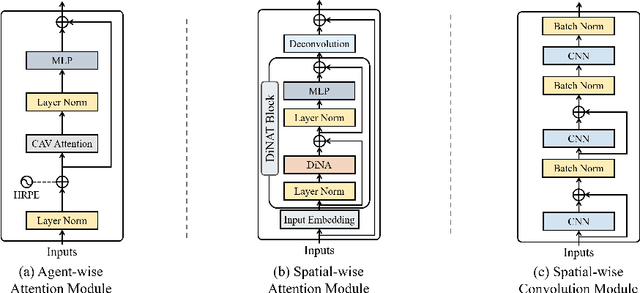
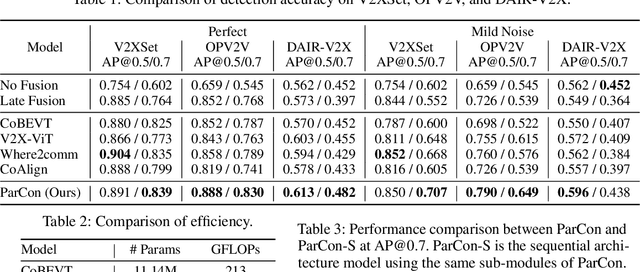
In this paper, we investigate improving the perception performance of autonomous vehicles through communication with other vehicles and road infrastructures. To this end, we introduce a collaborative perception model $\textbf{V2X-M2C}$, consisting of multiple modules, each generating inter-agent complementary information, spatial global context, and spatial local information. Inspired by the question of why most existing architectures are sequential, we analyze both the $\textit{sequential}$ and $\textit{parallel}$ connections of the modules. The sequential connection synergizes the modules, whereas the parallel connection independently improves each module. Extensive experiments demonstrate that V2X-M2C achieves state-of-the-art perception performance, increasing the detection accuracy by 8.00% to 10.87% and decreasing the FLOPs by 42.81% to 52.64%.
Safe Motion Planning against Multimodal Distributions based on a Scenario Approach
Aug 05, 2021



We present the design of a motion planning algorithm that ensures safety for an autonomous vehicle. In particular, we consider a multimodal distribution over uncertainties; for example, the uncertain predictions of future trajectories of surrounding vehicles reflect discrete decisions, such as turning or going straight at intersections. We develop a computationally efficient, scenario-based approach that solves the motion planning problem with high confidence given a quantifiable number of samples from the multimodal distribution. Our approach is based on two preprocessing steps, which 1) separate the samples into distinct clusters and 2) compute a bounding polytope for each cluster. Then, we rewrite the motion planning problem approximately as a mixed-integer problem using the polytopes. We demonstrate via simulation on the nuScenes dataset that our approach ensures safety with high probability in the presence of multimodal uncertainties, and is computationally more efficient and less conservative than a conventional scenario approach.
* Published in IEEE Control Systems Letters
Safety Verification and Control for Collision Avoidance at Road Intersections
Dec 08, 2016



This paper presents the design of a supervisory algorithm that monitors safety at road intersections and overrides drivers with a safe input when necessary. The design of the supervisor consists of two parts: safety verification and control design. Safety verification is the problem to determine if vehicles will be able to cross the intersection without colliding with current drivers' inputs. We translate this safety verification problem into a jobshop scheduling problem, which minimizes the maximum lateness and evaluates if the optimal cost is zero. The zero optimal cost corresponds to the case in which all vehicles can cross each conflict area without collisions. Computing the optimal cost requires solving a Mixed Integer Nonlinear Programming (MINLP) problem due to the nonlinear second-order dynamics of the vehicles. We therefore estimate this optimal cost by formulating two related Mixed Integer Linear Programming (MILP) problems that assume simpler vehicle dynamics. We prove that these two MILP problems yield lower and upper bounds of the optimal cost. We also quantify the worst case approximation errors of these MILP problems. We design the supervisor to override the vehicles with a safe control input if the MILP problem that computes the upper bound yields a positive optimal cost. We theoretically demonstrate that the supervisor keeps the intersection safe and is non-blocking. Computer simulations further validate that the algorithms can run in real time for problems of realistic size.