 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnimaSpark: A Feed-Forward Method for Animating Arbitrary 3D Objects
Jun 09, 2026While recent advancements in generative AI have substantially accelerated static 3D model creation workflows, the synthesis of category-agnostic 3D animations remains a significant bottleneck in 3D asset production. Current methods for category-agnostic animation generation exhibit critical limitations in inference speed, motion quality, and adherence to textual prompts, thereby leaving the process dependent on labor-intensive manual artistry. To address these challenges, this paper introduces AnimaSpark, a novel pipeline for category-agnostic 3D animation generation. Our approach is motivated by the key insight that for many fundamental motions in the 3D world, the corresponding joint transformations can often be effectively modeled within a two-dimensional subspace. The pipeline begins by rendering a rigged static 3D model into multi-layered image representations of its mesh and skeleton, which are subsequently fed into a video generation model. We then employ a keypoint tracking algorithm on the generated video to capture the motion of the skeletal joints projected onto the camera's viewing plane. In the final stage, we distill the planar translations and rotations from these tracked keypoints and lift them from the 2D domain into 3D space to animate the character. Comprehensive evaluations reveal that our method achieves superior performance over existing state-of-the-art techniques across key metrics, including text-motion alignment, quality of motion, and computational efficiency.
SubtleMemory: A Benchmark for Fine-Grained Relational Memory Discrimination in Long-Horizon AI Agents
Jun 04, 2026Persistent AI assistants, such as OpenClaw, accumulate large collections of related memories over long-term interactions. As these memories grow, they may reinforce one another, diverge across contexts, or directly conflict, making correct assistance depend on memory relations rather than isolated recall. Existing long-term memory benchmarks rarely probe how agents preserve and utilize such relations during downstream tasks. To address this gap, we introduce SubtleMemory, a benchmark for fine-grained relational memory discrimination in long-running AI agents. SubtleMemory constructs relation-controlled latent semantic artifacts whose variants instantiate complementary, nuanced, or contradictory relations, and embeds them into realistic user-agent histories, requiring agents to recover distributed relational structures during later queries and instructions. The benchmark contains 1,522 evaluation instances over 10 long histories, grounded in 1,090 relation-controlled memory-variant sets and spanning user-related and non-user-related queries. Evaluating six standalone memory systems, two Claw-style agents with native memory modules, and three Claw-style agents with plugin memory modules, we find that current systems remain weak on fine-grained relational memory discrimination. We further introduce diagnostic protocols that reveal distinct capability profiles across memory preservation, retrieval, and downstream reasoning stages.
Agent Planning Benchmark: A Diagnostic Framework for Planning Capabilities in LLM Agents
Jun 03, 2026Planning is central to LLM agents: before acting, an agent must decompose goals, select tools, reason over constraints, and decide when a task is infeasible. Yet existing agent evaluations often report only end-to-end success, making it difficult to determine whether failures stem from planning or execution. We introduce \textbf{Agent Planning Benchmark (APB)}, a planning-specific diagnostic benchmark with 4,209 multimodal cases across 22 domains and five settings, covering holistic planning, feedback-conditioned step-wise planning, and robustness under extraneous tools, broken tools, and unsolvable tasks. Across 12 MLLMs, APB reveals systematic weaknesses in long-horizon planning, tool-noise robustness, calibrated refusal, and inference-time refinement. We further validate APB on 200 ToolSandbox tasks and 200 $τ^2$-bench tasks, where APB-guided refinement consistently improves plan correctness, plan grade, and downstream execution metrics across three representative models. APB thus serves as an upstream diagnostic complement to execution benchmarks.
AnomalyAgent: Agentic Industrial Anomaly Synthesis via Tool-Augmented Reinforcement Learning
Apr 09, 2026Industrial anomaly generation is a crucial method for alleviating the data scarcity problem in anomaly detection tasks. Most existing anomaly synthesis methods rely on single-step generation mechanisms, lacking complex reasoning and iterative optimization capabilities, making it difficult to generate anomaly samples with high semantic realism. We propose AnomalyAgent, an anomaly synthesis agent with self-reflection, knowledge retrieval, and iterative refinement capabilities, aiming to generate realistic and diverse anomalies. Specifically, AnomalyAgent is equipped with five tools: Prompt Generation (PG), Image Generation (IG), Quality Evaluation (QE), Knowledge Retrieval (KR), and Mask Generation (MG), enabling closed-loop optimization. To improve decision-making and self-reflection, we construct structured trajectories from real anomaly images and design a two-stage training framework: supervised fine-tuning followed by reinforcement learning. This process is driven by a three-part reward mechanism: (1) task rewards to supervise the quality and location rationality of generated anomalies; (2) reflection rewards to train the model's ability to improve anomaly synthesis prompt; (3) behavioral rewards to ensure adherence to the trajectory. On the MVTec-AD dataset, AnomalyAgent achieves IS/IC-L of 2.10/0.33 for anomaly generation, 57.0% classification accuracy using ResNet34, and 99.3%/74.2% AP at the image/pixel level using a simple UNet, surpassing all zero-shot SOTA methods. The code and data will be made publicly available.
O-ConNet: Geometry-Aware End-to-End Inference of Over-Constrained Spatial Mechanisms
Apr 02, 2026Deep learning has shown strong potential for scientific discovery, but its ability to model macroscopic rigid-body kinematic constraints remains underexplored. We study this problem on spatial over-constrained mechanisms and propose O-ConNet, an end-to-end framework that infers mechanism structural parameters from only three sparse reachable points while reconstructing the full motion trajectory, without explicitly solving constraint equations during inference. On a self-constructed Bennett 4R dataset of 42,860 valid samples, O-ConNet achieves Param-MAE 0.276 +/- 0.077 and Traj-MAE 0.145 +/- 0.018 (mean +/- std over 10 runs), outperforming the strongest sequence baseline (LSTM-Seq2Seq) by 65.1 percent and 88.2 percent, respectively. These results suggest that end-to-end learning can capture closed-loop geometric structure and provide a practical route for inverse design of spatial over-constrained mechanisms under extremely sparse observations.
AdaReasoner: Dynamic Tool Orchestration for Iterative Visual Reasoning
Jan 26, 2026When humans face problems beyond their immediate capabilities, they rely on tools, providing a promising paradigm for improving visual reasoning in multimodal large language models (MLLMs). Effective reasoning, therefore, hinges on knowing which tools to use, when to invoke them, and how to compose them over multiple steps, even when faced with new tools or new tasks. We introduce \textbf{AdaReasoner}, a family of multimodal models that learn tool use as a general reasoning skill rather than as tool-specific or explicitly supervised behavior. AdaReasoner is enabled by (i) a scalable data curation pipeline exposing models to long-horizon, multi-step tool interactions; (ii) Tool-GRPO, a reinforcement learning algorithm that optimizes tool selection and sequencing based on end-task success; and (iii) an adaptive learning mechanism that dynamically regulates tool usage. Together, these components allow models to infer tool utility from task context and intermediate outcomes, enabling coordination of multiple tools and generalization to unseen tools. Empirically, AdaReasoner exhibits strong tool-adaptive and generalization behaviors: it autonomously adopts beneficial tools, suppresses irrelevant ones, and adjusts tool usage frequency based on task demands, despite never being explicitly trained to do so. These capabilities translate into state-of-the-art performance across challenging benchmarks, improving the 7B base model by +24.9\% on average and surpassing strong proprietary systems such as GPT-5 on multiple tasks, including VSP and Jigsaw.
FullFront: Benchmarking MLLMs Across the Full Front-End Engineering Workflow
May 26, 2025Front-end engineering involves a complex workflow where engineers conceptualize designs, translate them into code, and iteratively refine the implementation. While recent benchmarks primarily focus on converting visual designs to code, we present FullFront, a benchmark designed to evaluate Multimodal Large Language Models (MLLMs) \textbf{across the full front-end development pipeline}. FullFront assesses three fundamental tasks that map directly to the front-end engineering pipeline: Webpage Design (conceptualization phase), Webpage Perception QA (comprehension of visual organization and elements), and Webpage Code Generation (implementation phase). Unlike existing benchmarks that use either scraped websites with bloated code or oversimplified LLM-generated HTML, FullFront employs a novel, two-stage process to transform real-world webpages into clean, standardized HTML while maintaining diverse visual designs and avoiding copyright issues. Extensive testing of state-of-the-art MLLMs reveals significant limitations in page perception, code generation (particularly for image handling and layout), and interaction implementation. Our results quantitatively demonstrate performance disparities across models and tasks, and highlight a substantial gap between current MLLM capabilities and human expert performance in front-end engineering. The FullFront benchmark and code are available in https://github.com/Mikivishy/FullFront.
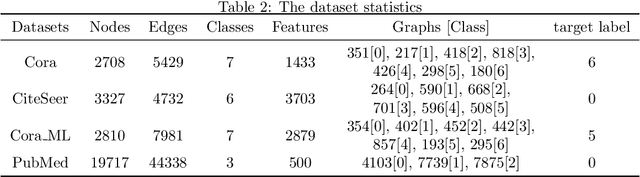
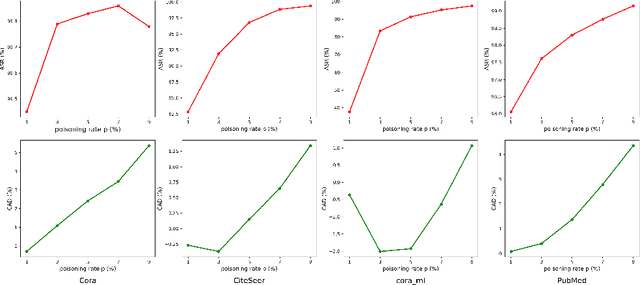
A Semantic and Clean-label Backdoor Attack against Graph Convolutional Networks
Mar 19, 2025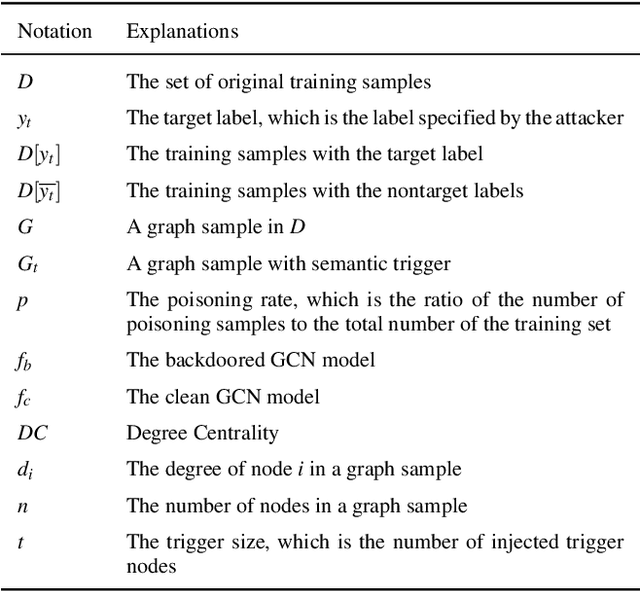
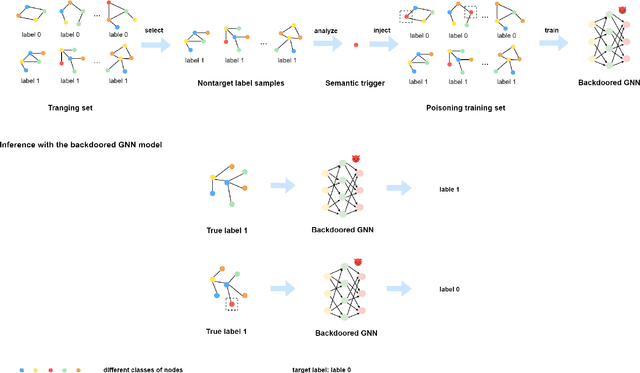

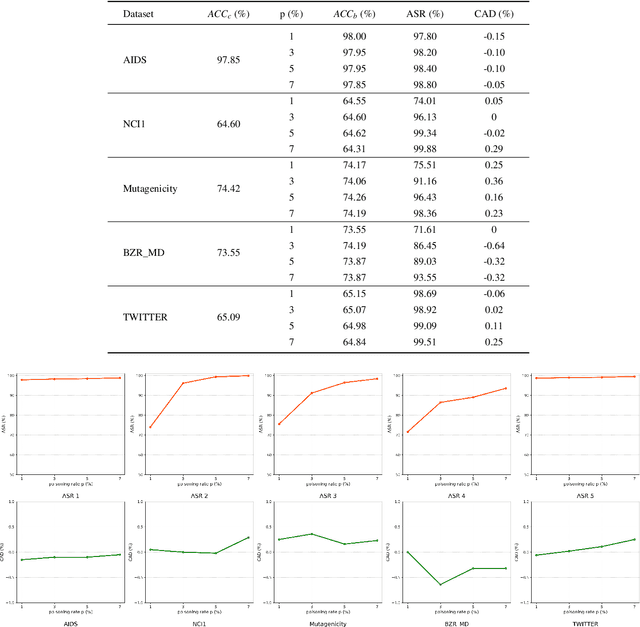
Graph Convolutional Networks (GCNs) have shown excellent performance in graph-structured tasks such as node classification and graph classification. However, recent research has shown that GCNs are vulnerable to a new type of threat called the backdoor attack, where the adversary can inject a hidden backdoor into the GCNs so that the backdoored model performs well on benign samples, whereas its prediction will be maliciously changed to the attacker-specified target label if the hidden backdoor is activated by the attacker-defined trigger. Clean-label backdoor attack and semantic backdoor attack are two new backdoor attacks to Deep Neural Networks (DNNs), they are more imperceptible and have posed new and serious threats. The semantic and clean-label backdoor attack is not fully explored in GCNs. In this paper, we propose a semantic and clean-label backdoor attack against GCNs under the context of graph classification to reveal the existence of this security vulnerability in GCNs. Specifically, SCLBA conducts an importance analysis on graph samples to select one type of node as semantic trigger, which is then inserted into the graph samples to create poisoning samples without changing the labels of the poisoning samples to the attacker-specified target label. We evaluate SCLBA on multiple datasets and the results show that SCLBA can achieve attack success rates close to 99% with poisoning rates of less than 3%, and with almost no impact on the performance of model on benign samples.
CRASH: Crash Recognition and Anticipation System Harnessing with Context-Aware and Temporal Focus Attentions
Jul 25, 2024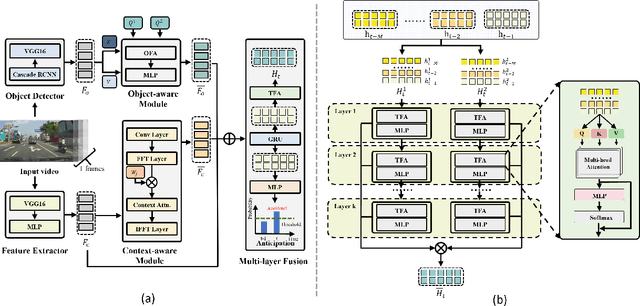



Accurately and promptly predicting accidents among surrounding traffic agents from camera footage is crucial for the safety of autonomous vehicles (AVs). This task presents substantial challenges stemming from the unpredictable nature of traffic accidents, their long-tail distribution, the intricacies of traffic scene dynamics, and the inherently constrained field of vision of onboard cameras. To address these challenges, this study introduces a novel accident anticipation framework for AVs, termed CRASH. It seamlessly integrates five components: object detector, feature extractor, object-aware module, context-aware module, and multi-layer fusion. Specifically, we develop the object-aware module to prioritize high-risk objects in complex and ambiguous environments by calculating the spatial-temporal relationships between traffic agents. In parallel, the context-aware is also devised to extend global visual information from the temporal to the frequency domain using the Fast Fourier Transform (FFT) and capture fine-grained visual features of potential objects and broader context cues within traffic scenes. To capture a wider range of visual cues, we further propose a multi-layer fusion that dynamically computes the temporal dependencies between different scenes and iteratively updates the correlations between different visual features for accurate and timely accident prediction. Evaluated on real-world datasets--Dashcam Accident Dataset (DAD), Car Crash Dataset (CCD), and AnAn Accident Detection (A3D) datasets--our model surpasses existing top baselines in critical evaluation metrics like Average Precision (AP) and mean Time-To-Accident (mTTA). Importantly, its robustness and adaptability are particularly evident in challenging driving scenarios with missing or limited training data, demonstrating significant potential for application in real-world autonomous driving systems.
A Clean-graph Backdoor Attack against Graph Convolutional Networks with Poisoned Label Only
Apr 19, 2024
Graph Convolutional Networks (GCNs) have shown excellent performance in dealing with various graph structures such as node classification, graph classification and other tasks. However,recent studies have shown that GCNs are vulnerable to a novel threat known as backdoor attacks. However, all existing backdoor attacks in the graph domain require modifying the training samples to accomplish the backdoor injection, which may not be practical in many realistic scenarios where adversaries have no access to modify the training samples and may leads to the backdoor attack being detected easily. In order to explore the backdoor vulnerability of GCNs and create a more practical and stealthy backdoor attack method, this paper proposes a clean-graph backdoor attack against GCNs (CBAG) in the node classification task,which only poisons the training labels without any modification to the training samples, revealing that GCNs have this security vulnerability. Specifically, CBAG designs a new trigger exploration method to find important feature dimensions as the trigger patterns to improve the attack performance. By poisoning the training labels, a hidden backdoor is injected into the GCNs model. Experimental results show that our clean graph backdoor can achieve 99% attack success rate while maintaining the functionality of the GCNs model on benign samples.