 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDARDraft: Generating LiDAR Point Cloud from Versatile Inputs
Dec 23, 2025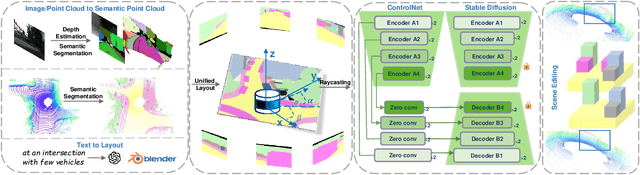
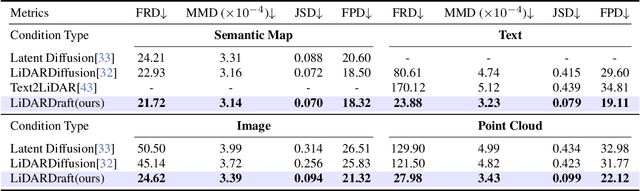
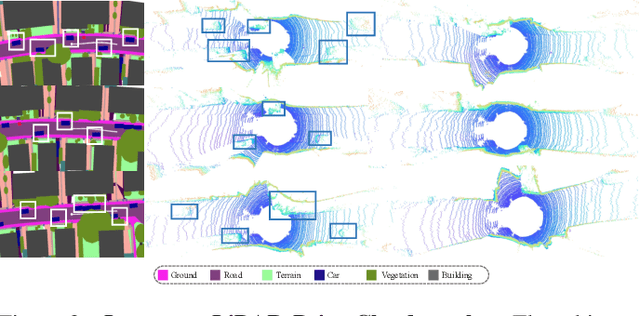
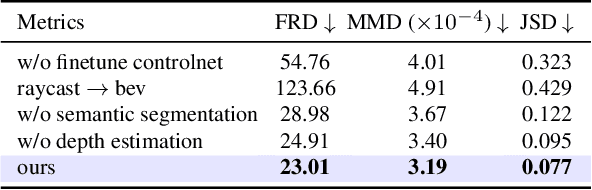
Generating realistic and diverse LiDAR point clouds is crucial for autonomous driving simulation. Although previous methods achieve LiDAR point cloud generation from user inputs, they struggle to attain high-quality results while enabling versatile controllability, due to the imbalance between the complex distribution of LiDAR point clouds and the simple control signals. To address the limitation, we propose LiDARDraft, which utilizes the 3D layout to build a bridge between versatile conditional signals and LiDAR point clouds. The 3D layout can be trivially generated from various user inputs such as textual descriptions and images. Specifically, we represent text, images, and point clouds as unified 3D layouts, which are further transformed into semantic and depth control signals. Then, we employ a rangemap-based ControlNet to guide LiDAR point cloud generation. This pixel-level alignment approach demonstrates excellent performance in controllable LiDAR point clouds generation, enabling "simulation from scratch", allowing self-driving environments to be created from arbitrary textual descriptions, images and sketches.
GeoNLF: Geometry guided Pose-Free Neural LiDAR Fields
Jul 08, 2024Although recent efforts have extended Neural Radiance Fields (NeRF) into LiDAR point cloud synthesis, the majority of existing works exhibit a strong dependence on precomputed poses. However, point cloud registration methods struggle to achieve precise global pose estimation, whereas previous pose-free NeRFs overlook geometric consistency in global reconstruction. In light of this, we explore the geometric insights of point clouds, which provide explicit registration priors for reconstruction. Based on this, we propose Geometry guided Neural LiDAR Fields(GeoNLF), a hybrid framework performing alternately global neural reconstruction and pure geometric pose optimization. Furthermore, NeRFs tend to overfit individual frames and easily get stuck in local minima under sparse-view inputs. To tackle this issue, we develop a selective-reweighting strategy and introduce geometric constraints for robust optimization. Extensive experiments on NuScenes and KITTI-360 datasets demonstrate the superiority of GeoNLF in both novel view synthesis and multi-view registration of low-frequency large-scale point clouds.