 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePano360: Perspective to Panoramic Vision with Geometric Consistency
Mar 12, 2026Prior panorama stitching approaches heavily rely on pairwise feature correspondences and are unable to leverage geometric consistency across multiple views. This leads to severe distortion and misalignment, especially in challenging scenes with weak textures, large parallax, and repetitive patterns. Given that multi-view geometric correspondences can be directly constructed in 3D space, making them more accurate and globally consistent, we extend the 2D alignment task to the 3D photogrammetric space. We adopt a novel transformer-based architecture to achieve 3D awareness and aggregate global information across all views. It directly utilizes camera poses to guide image warping for global alignment in 3D space and employs a multi-feature joint optimization strategy to compute the seams. Additionally, to establish an evaluation benchmark and train our network, we constructed a large-scale dataset of real-world scenes. Extensive experiments show that our method significantly outperforms existing alternatives in alignment accuracy and perceptual quality.
LiDARDraft: Generating LiDAR Point Cloud from Versatile Inputs
Dec 23, 2025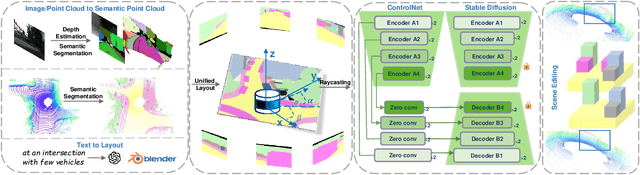
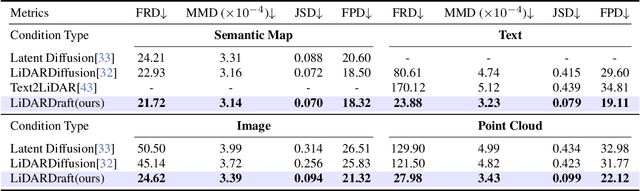
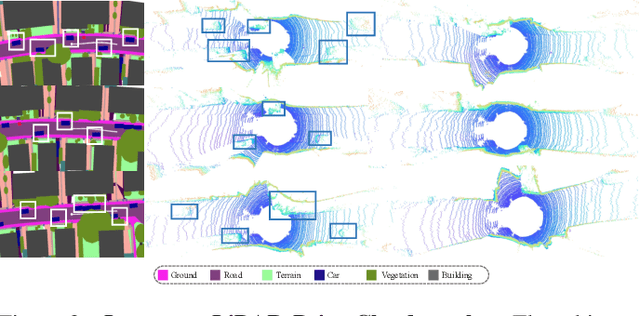
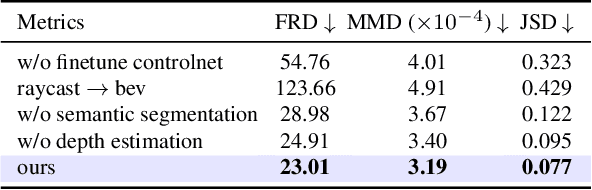
Generating realistic and diverse LiDAR point clouds is crucial for autonomous driving simulation. Although previous methods achieve LiDAR point cloud generation from user inputs, they struggle to attain high-quality results while enabling versatile controllability, due to the imbalance between the complex distribution of LiDAR point clouds and the simple control signals. To address the limitation, we propose LiDARDraft, which utilizes the 3D layout to build a bridge between versatile conditional signals and LiDAR point clouds. The 3D layout can be trivially generated from various user inputs such as textual descriptions and images. Specifically, we represent text, images, and point clouds as unified 3D layouts, which are further transformed into semantic and depth control signals. Then, we employ a rangemap-based ControlNet to guide LiDAR point cloud generation. This pixel-level alignment approach demonstrates excellent performance in controllable LiDAR point clouds generation, enabling "simulation from scratch", allowing self-driving environments to be created from arbitrary textual descriptions, images and sketches.
GeoNLF: Geometry guided Pose-Free Neural LiDAR Fields
Jul 08, 2024Although recent efforts have extended Neural Radiance Fields (NeRF) into LiDAR point cloud synthesis, the majority of existing works exhibit a strong dependence on precomputed poses. However, point cloud registration methods struggle to achieve precise global pose estimation, whereas previous pose-free NeRFs overlook geometric consistency in global reconstruction. In light of this, we explore the geometric insights of point clouds, which provide explicit registration priors for reconstruction. Based on this, we propose Geometry guided Neural LiDAR Fields(GeoNLF), a hybrid framework performing alternately global neural reconstruction and pure geometric pose optimization. Furthermore, NeRFs tend to overfit individual frames and easily get stuck in local minima under sparse-view inputs. To tackle this issue, we develop a selective-reweighting strategy and introduce geometric constraints for robust optimization. Extensive experiments on NuScenes and KITTI-360 datasets demonstrate the superiority of GeoNLF in both novel view synthesis and multi-view registration of low-frequency large-scale point clouds.
LiDAR4D: Dynamic Neural Fields for Novel Space-time View LiDAR Synthesis
Apr 03, 2024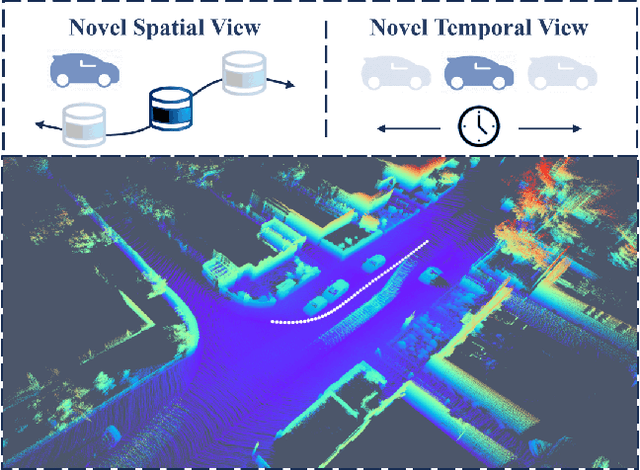
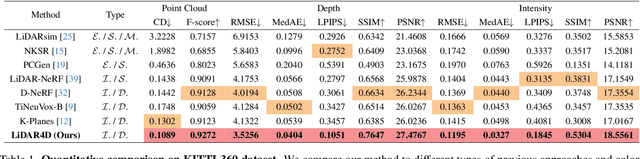
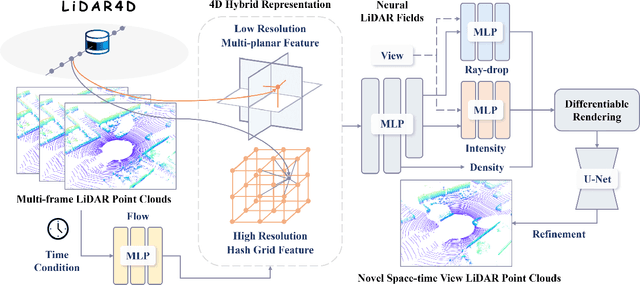
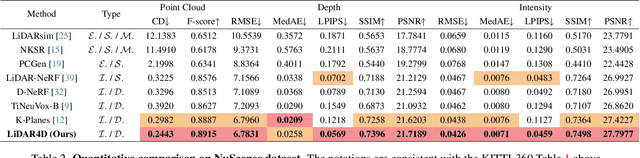
Although neural radiance fields (NeRFs) have achieved triumphs in image novel view synthesis (NVS), LiDAR NVS remains largely unexplored. Previous LiDAR NVS methods employ a simple shift from image NVS methods while ignoring the dynamic nature and the large-scale reconstruction problem of LiDAR point clouds. In light of this, we propose LiDAR4D, a differentiable LiDAR-only framework for novel space-time LiDAR view synthesis. In consideration of the sparsity and large-scale characteristics, we design a 4D hybrid representation combined with multi-planar and grid features to achieve effective reconstruction in a coarse-to-fine manner. Furthermore, we introduce geometric constraints derived from point clouds to improve temporal consistency. For the realistic synthesis of LiDAR point clouds, we incorporate the global optimization of ray-drop probability to preserve cross-region patterns. Extensive experiments on KITTI-360 and NuScenes datasets demonstrate the superiority of our method in accomplishing geometry-aware and time-consistent dynamic reconstruction. Codes are available at https://github.com/ispc-lab/LiDAR4D.
HDMNet: A Hierarchical Matching Network with Double Attention for Large-scale Outdoor LiDAR Point Cloud Registration
Oct 29, 2023



Outdoor LiDAR point clouds are typically large-scale and complexly distributed. To achieve efficient and accurate registration, emphasizing the similarity among local regions and prioritizing global local-to-local matching is of utmost importance, subsequent to which accuracy can be enhanced through cost-effective fine registration. In this paper, a novel hierarchical neural network with double attention named HDMNet is proposed for large-scale outdoor LiDAR point cloud registration. Specifically, A novel feature consistency enhanced double-soft matching network is introduced to achieve two-stage matching with high flexibility while enlarging the receptive field with high efficiency in a patch-to patch manner, which significantly improves the registration performance. Moreover, in order to further utilize the sparse matching information from deeper layer, we develop a novel trainable embedding mask to incorporate the confidence scores of correspondences obtained from pose estimation of deeper layer, eliminating additional computations. The high-confidence keypoints in the sparser point cloud of the deeper layer correspond to a high-confidence spatial neighborhood region in shallower layer, which will receive more attention, while the features of non-key regions will be masked. Extensive experiments are conducted on two large-scale outdoor LiDAR point cloud datasets to demonstrate the high accuracy and efficiency of the proposed HDMNet.